Hi,
I am currently working on a robotic arm. I am using these:
2x dynamixel motors XM540-W150
2x dynamixel motors XM540-W270
2x dynamixel motors XM430-W210
U2D2 to connect to my microsoft PC
2x Power Hub Board
The two XM540-W270 are on the same joint. One of them is in slave mode. The other motors control the other joints. I therefore have a 5 degree of freedom robotic arm (you get the picture?).
The baudrate of each motor is at 4 000 000 bps. The usb port (COM) is set at 9600 bps and has latency time of 1 ms.
My problems are the following:
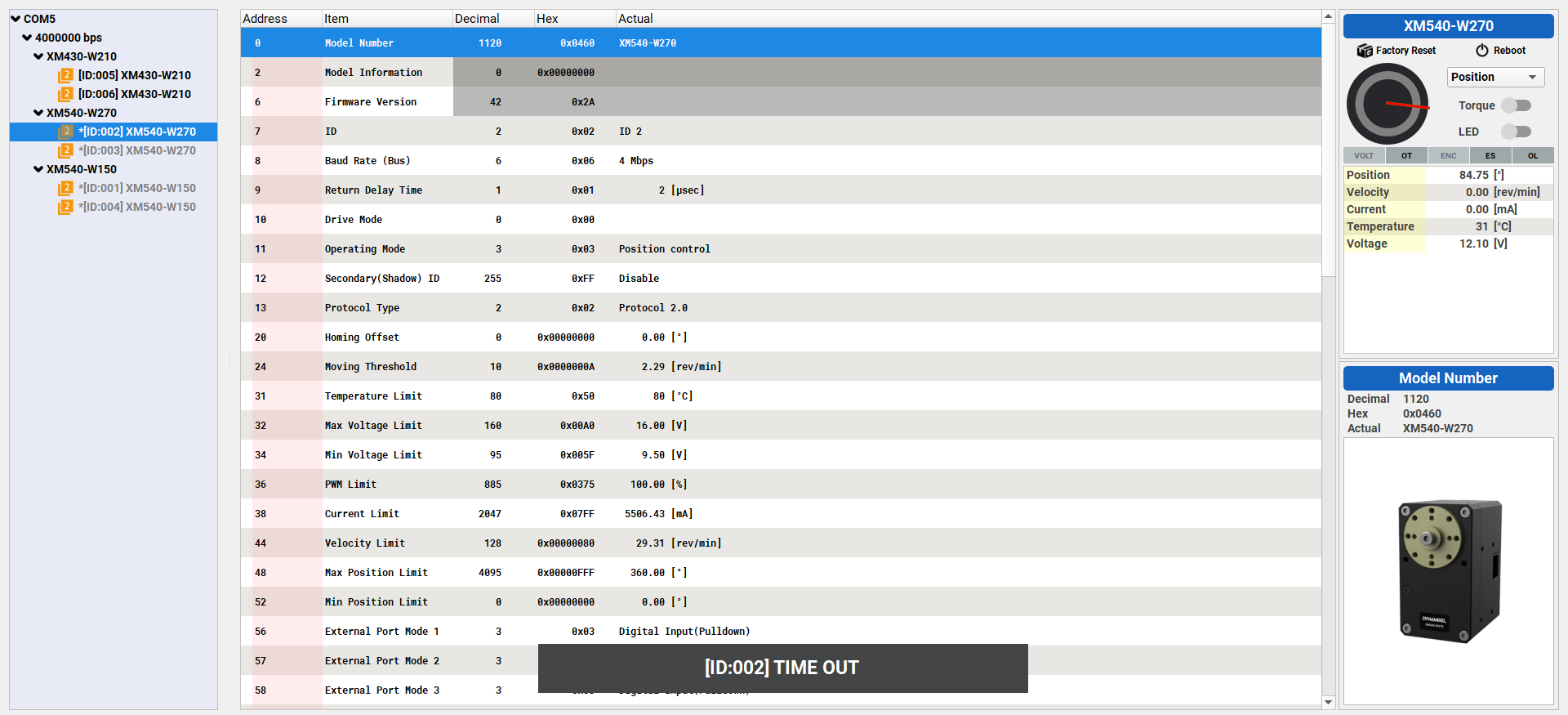
When I scan my motors on Dynamixel Wizard, the software doesn’t always detect 6 motors. Would you know why? When it happens, I just scan it again until it detects 6 motors.
I always get the Time Out pop up (as shown on the picture):
This happens whether the torque is enabled or disabled. It happens with all the motors. From what I understand, I get this message because I didn’t receive my motor’s status message within 5 milliseconds. Is that correct? My question is why do I keep getting this pop up and how can I avoid it? I believe it affects the control of the robotic arm because I sometimes read the position of my motors to be all at 0, which I know is false.
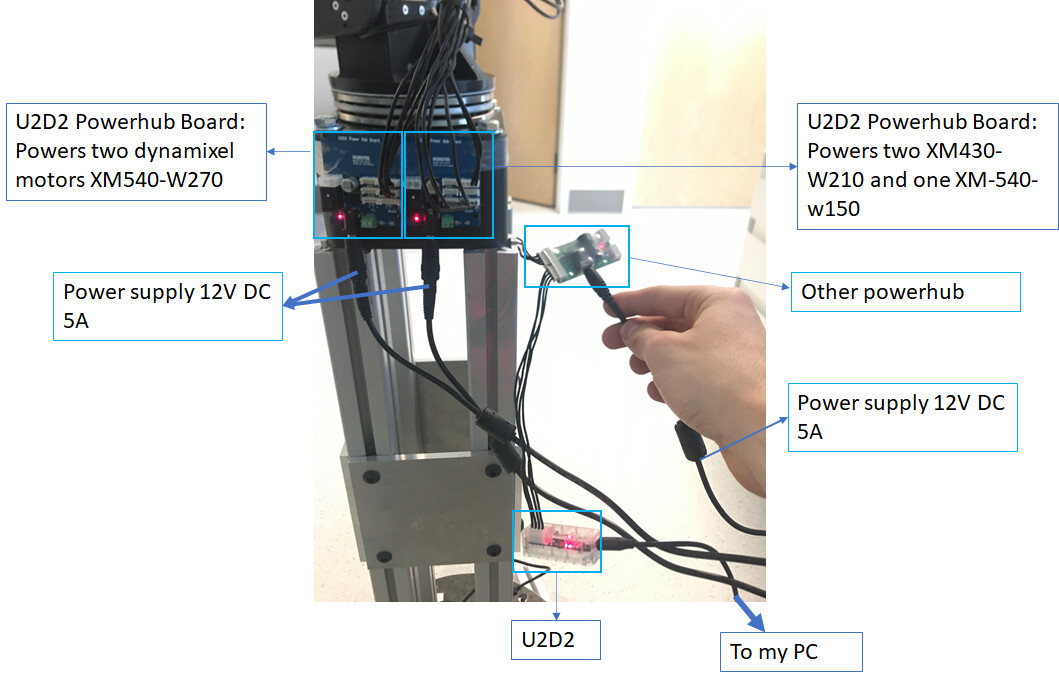
Could you descrbie how DYNAMIXEL modules are connected to the U2D2?
Are you controlling them with your PC?
When other controller (such as Arduino or Raspberry Pi) is connected and transmitting instructions to DYNAMIXEL, you could get a time out error as instructions from U2D2 and the controller will collide.
Another helpful information that helps finding the cause of issue would be the physical communication type(TTL or RS-485) and the length and type of cables used to configure the system.
Hello @ROBOTIS-Will
Right now, I am controlling them directly from my PC. To be honnest, I do not know how to ckeck which protocol I’m using. Is there a way to check via the dynamixel wizar? I am writing and reading information using groupSyncRead and groupSyncWrite from the dynamixel_sdk library. As for the length of cables, it’s about 1-2 meters long from my PC to the last motor. I believe we are using 4 ports cables that were bought on Robotis of different length.
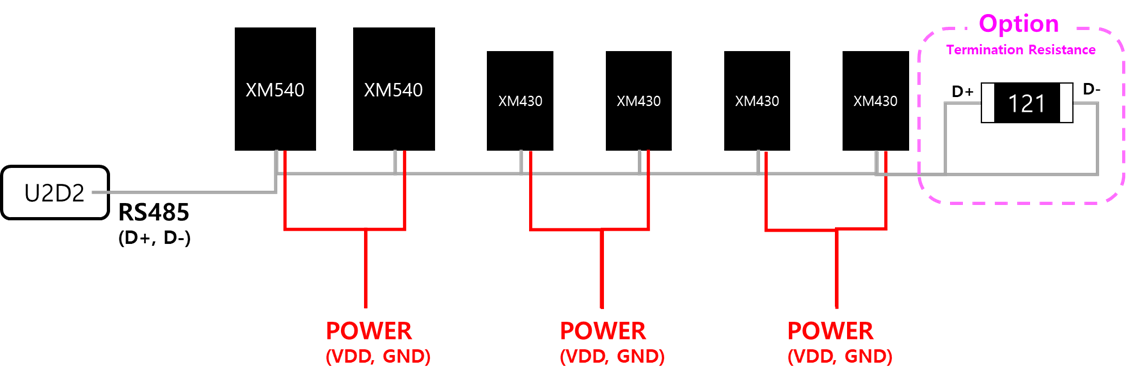
As for the description, it is expected that the problem occurred due to a lot of noise in the communication. In my opinion, it is a problem caused by the complicated wiring of the system Xavixav’s configuration. I recommend making the connection of the communication lines (D+, D-) as simple as possible by configuring the daisy chain connection as shown in the following figure. To do that, you need to unplug the pin from the cable. Additionally, connecting a terminating resistor of 120Ω at the end of the daisy chain connection also helps reduce communication noise.
Sorry about the delayed reply.
Make sure that you are not running controller while connecting to DYNAMIXEL Wizard 2.0 because DYNAMIXEL Wizard 2.0 keep reads from connected DYNAMIXEL and if there’s any communication collision due to a activated controller that sends DYNAMIXEL packet will cause unexpected error.
Like @kyj mentioned in the above reply, your connection seem a bit complicated. Please try to simplify the connection and if possible, twist the D+ and D- of RS-485 cable for better immunity for the external noise. Attach the 120 ohm termination resistor could help increasing communication stability.
Thank you.
=====Appended=====
Using lower baudrates such as 2Mbps or 3Mbps may also help to resolve the issue if you don’t have to use very high control frequency.