When the turtlebot3 startup in ros2 that the odometry is not on the initial straight 0,0.
and has a strange value and keeps jumping.
How to solve it so that returns to the origin and without any jumping?
Your prompt reply would be greatly appreciated.
Thank you!
Tim.
Initial pose estimation is required after TB3 startup for the robot to correctly determine it’s starting position.
I not use it to navigation.
I only need the data about wheel odometry on turtlebot3.
But the wheel odometry of turtlebot3 is keep jumping and initial position not in (0,0) and orientation not along the x-axis of go straight.
like picture
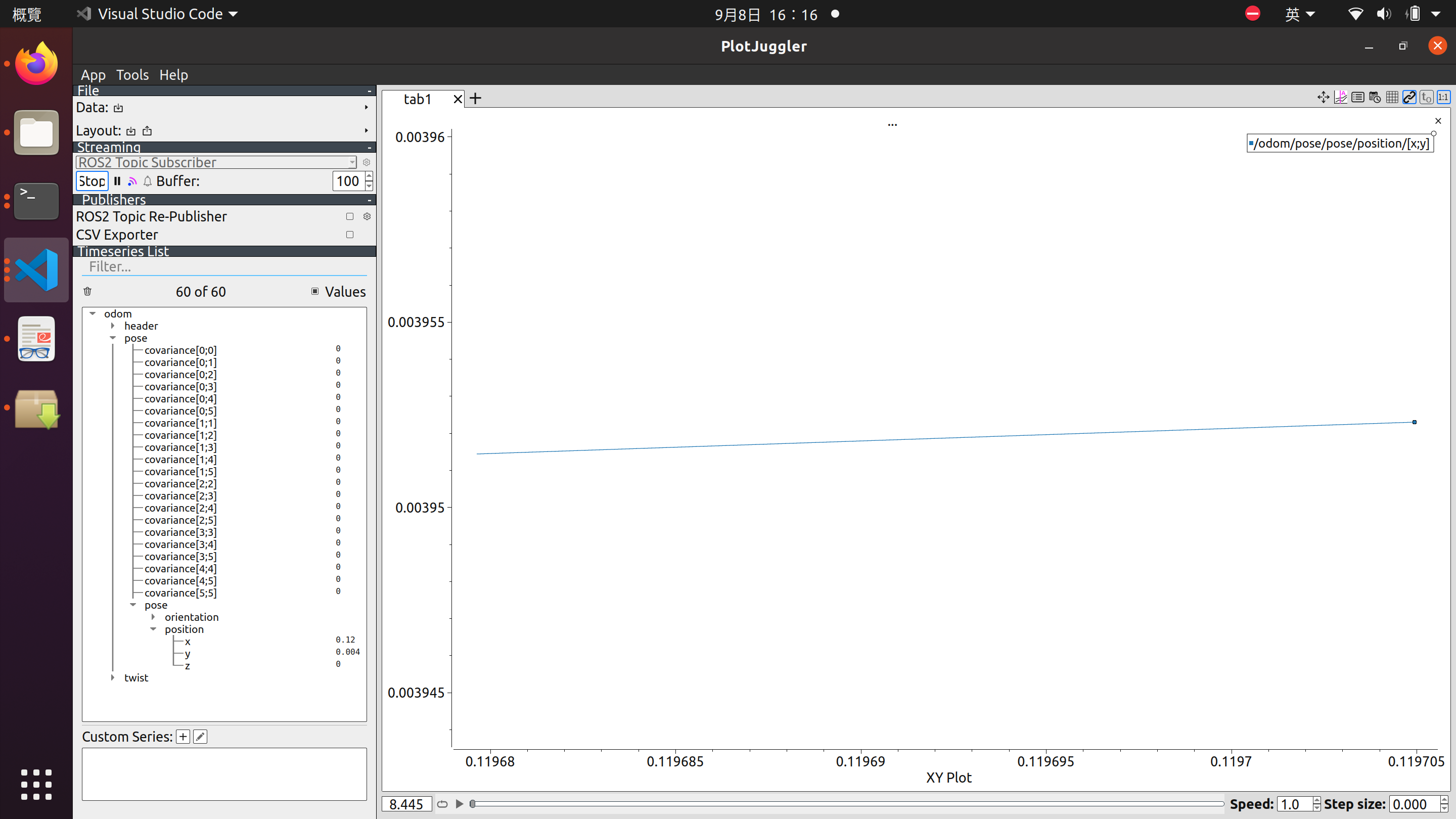
It’s possible that your issue may also be related to outdated OpenCR firmware. In this case, you should follow the firmware update process on the TurtleBot eManual page to see if that resolves your issue.
I have updated OpenCR to the latest version according to this file, but I still have the same problem. Not only position and orientation also have values that are not inition.
As mentioned above.