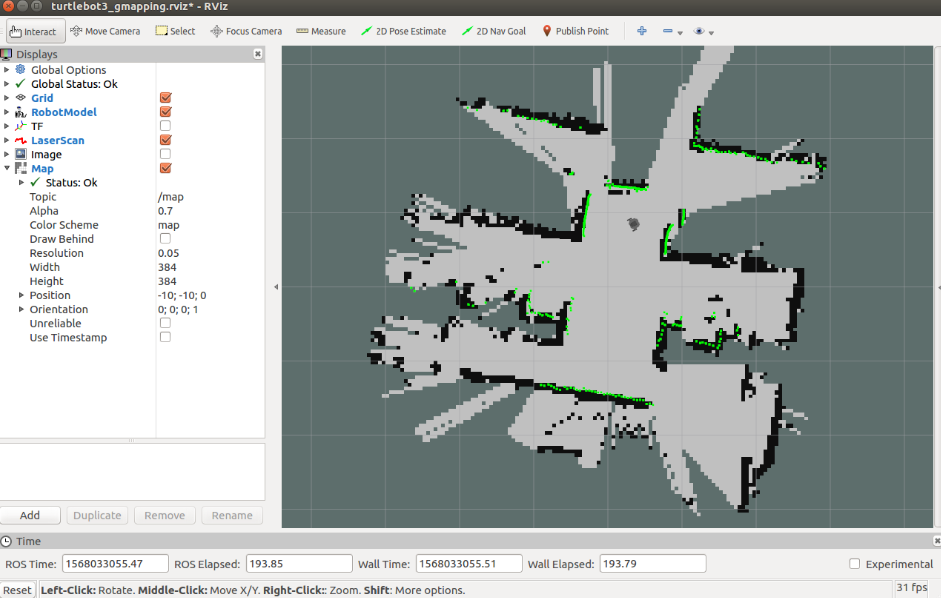
해당 이미지는 인터넷에서 가져온 것 입니다만… 참조하자면
로보티즈 e manual에서 slam simulation을 했을 때 ( ```
$ export TURTLEBOT3_MODEL=burger
$ roslaunch turtlebot3_slam turtlebot3_slam.launch slam_methods:=gmapping
Global option에서 frame map→odom 으로 바꿨을 때 slam화면의 Laser scan에서 에러(빨강색)랑 정상(초록)이 번갈아 가면서 계속 깜박입니다. 해당 오류 메세지 로는
Transform [sender=unknown_publisher] Message removed because it is too old (frame=[base_scan], stamp=[199.381000000]) 이렇게 뜹니다 무슨 오류인가요? ㅠㅠ