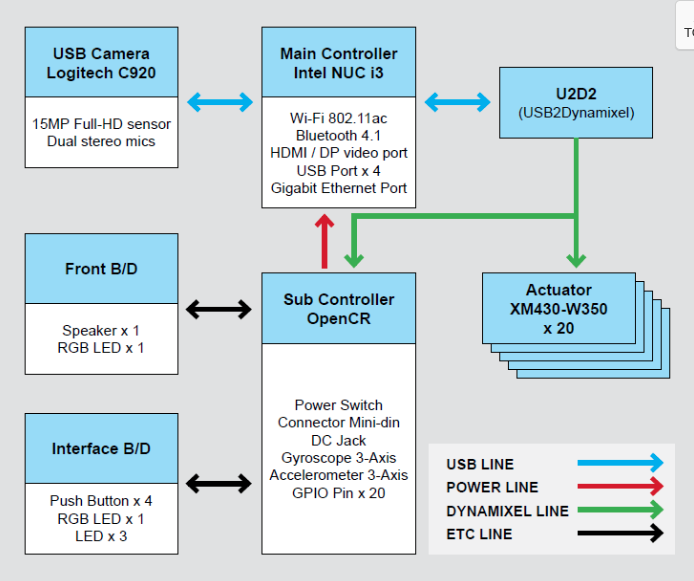
dynamixel SDK 와 u2d2 를 활용하면 컴퓨터-u2d2-dynamixel 의 형태로 모터 명령과 현재 모터 엔코더 값을 받을 수 있는 것으로 파악하였습니다. 그렇다면 openCR 은 왜 필요하게 되나요 특히 darwin op3 의 system block diagram 에서 actuator 와 sub controller 인 openCR 은 왜 연결이 되어 있나요?
단순히 전원 공급을 openCR 로 하기 때문인가요?
dynamixel SDK 와 u2d2 를 활용하면 컴퓨터-u2d2-dynamixel 의 형태로 모터 명령과 현재 모터 엔코더 값을 받을 수 있는 것으로 파악하였습니다. 그렇다면 openCR 은 왜 필요하게 되나요 특히 darwin op3 의 system block diagram 에서 actuator 와 sub controller 인 openCR 은 왜 연결이 되어 있나요?
단순히 전원 공급을 openCR 로 하기 때문인가요?
Darwin OP3의 시스템에서 OpenCR의 역할은 단순히 전원 공급만이 아니라, 중요한 중재자 역할과 보조 컨트롤러의 역할을 수행하기 때문입니다. 다음은 OpenCR이 왜 필요하고 어떤 역할을 하는지 자세히 설명하겠습니다.
OpenCR은 컴퓨터와 Dynamixel 사이의 단순한 브릿지 이상의 역할을 하며, Darwin OP3의 전반적인 하드웨어 통합을 위한 핵심 보조 컨트롤러로 사용됩니다.
Darwin OP3 시스템 다이어그램에서 OpenCR이 포함된 이유는 다음과 같습니다:
| 특징 | U2D2 | OpenCR |
|---|---|---|
| 역할 | USB to RS485 변환기 | 보조 컨트롤러 및 통합 관리 |
| 제어 대상 | Dynamixel 모터만 제어 | Dynamixel, 센서, 다른 액추에이터 통합 제어 |
| 실시간 제어 능력 | 없음 | 있음 (로컬 제어 가능) |
| 전원 관리 기능 | 없음 | 있음 (전압 안정화 및 보호 회로 포함) |
| 추가 센서 연결 | 불가능 | 가능 (IMU, 초음파, GPIO 장치 등 연결 가능) |
OpenCR은 Darwin OP3와 같은 로봇 시스템에서 필수적인 로컬 컨트롤러 및 허브 역할을 수행합니다. U2D2와 같은 단순 변환기로는 OpenCR이 제공하는 통합 관리, 실시간 제어, 전원 관리 기능을 대체할 수 없습니다. OpenCR은 PC와 모터, 센서를 연결하고 제어하는 중재자 역할을 수행하며, 로봇의 안정적인 동작과 효율적인 통합을 위해 설계되었습니다.