Dynamixel Model : AX-12A
Control environment :
- Arduino UNO, Dynamixel shield, 12V SMPS & AX-12A
- Arduino Leonardo, Dynamixel shield, 12V SMPS & AX-12A
- Arduino UNO, 12V SMPS & AX-12A
Library Used :
a. GitHub - ROBOTIS-GIT/DynamixelShield: DynamixelShield Library for Arduino
b. GitHub - ROBOTIS-GIT/Dynamixel2Arduino: DYNAMIXEL protocol library for Arduino
c. GitHub - jumejume1/AX-12A-servo-library
Issue Description
1. Arduino UNO & Dynamixel shield
We are facing issue while trying to rotate motor through dynamixel shield and Arduino UNO. All recommended libraries are installed. when we are uploading ping example code, not getting any value. you can refer the below Screenshot.

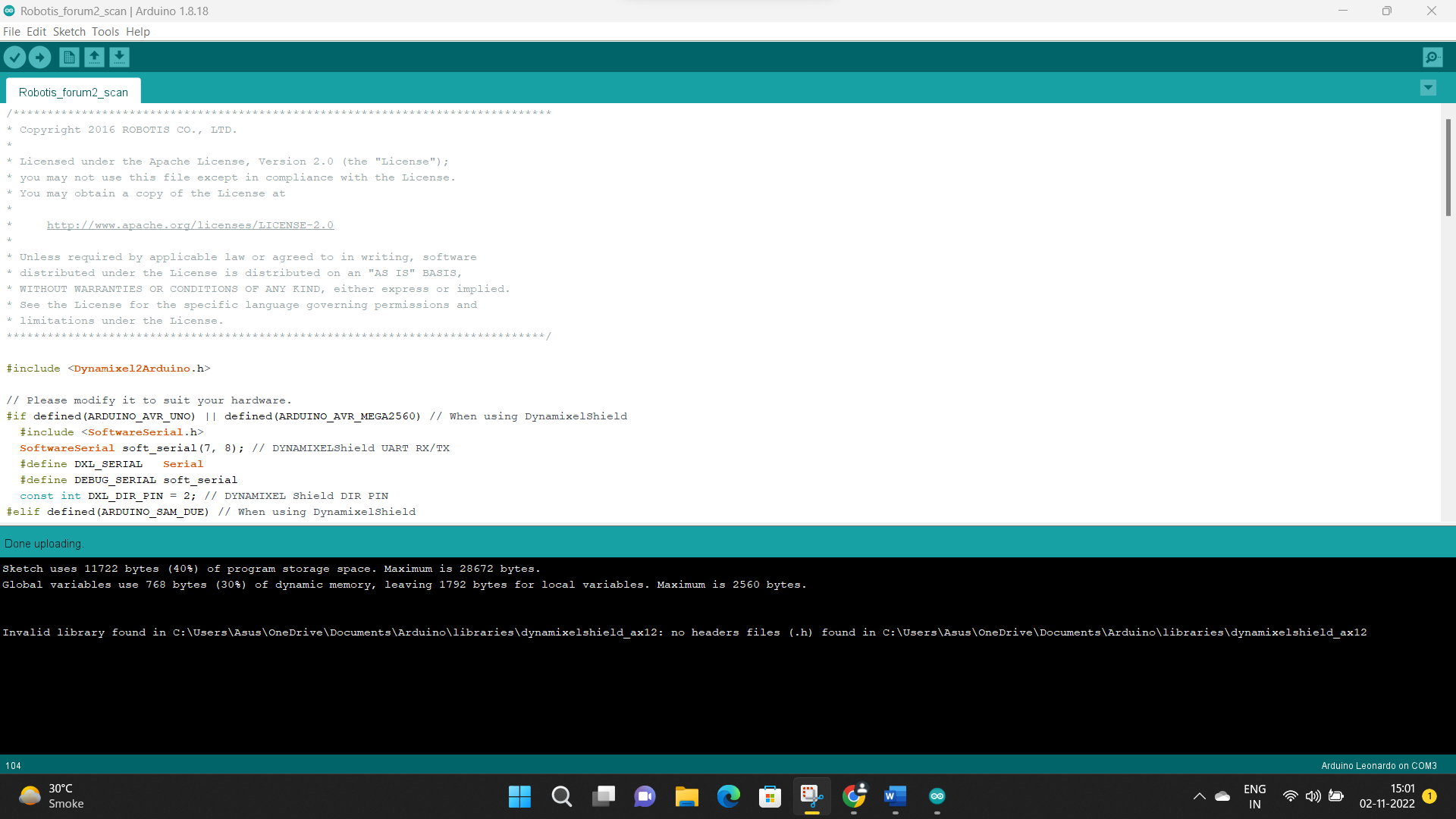
when we upload scan_dynamixel code motor is not able to communicate with dynamixel shield. you can refer the attached video link -
https://drive.google.com/file/d/1zqOrHTAfDPqGQ-b6yLJfgY1-dRUElVuE/view?usp=sharing
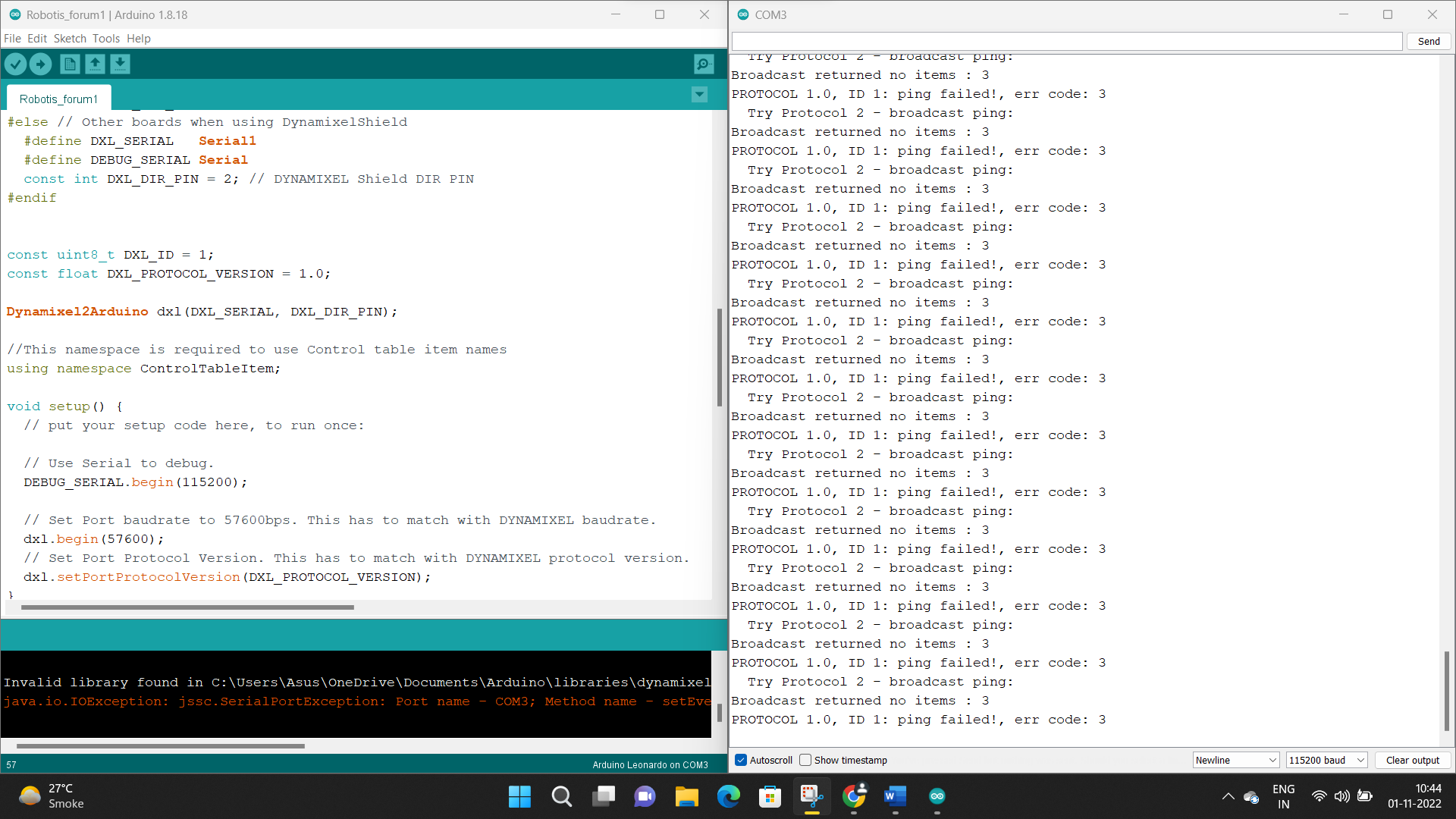
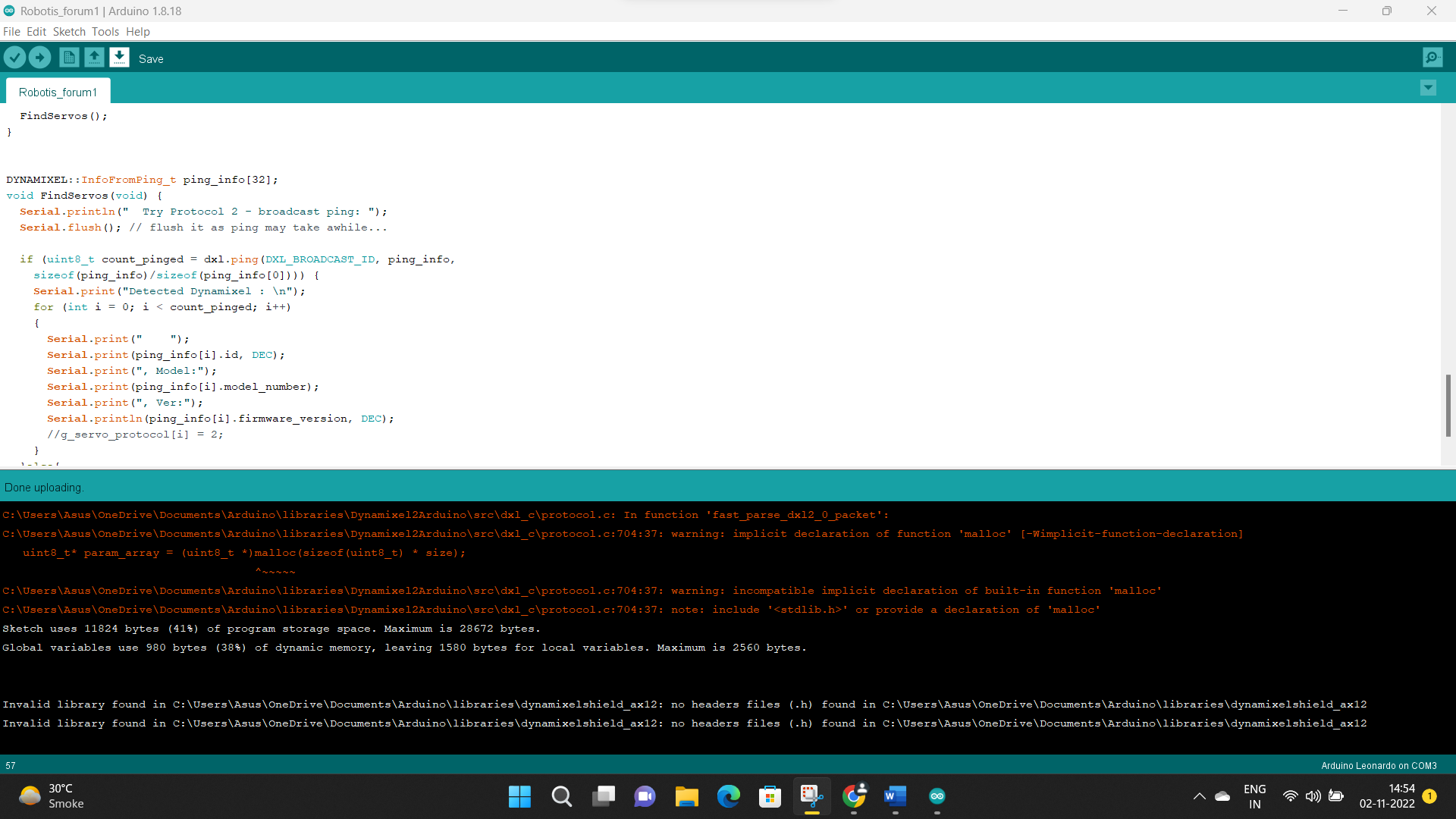
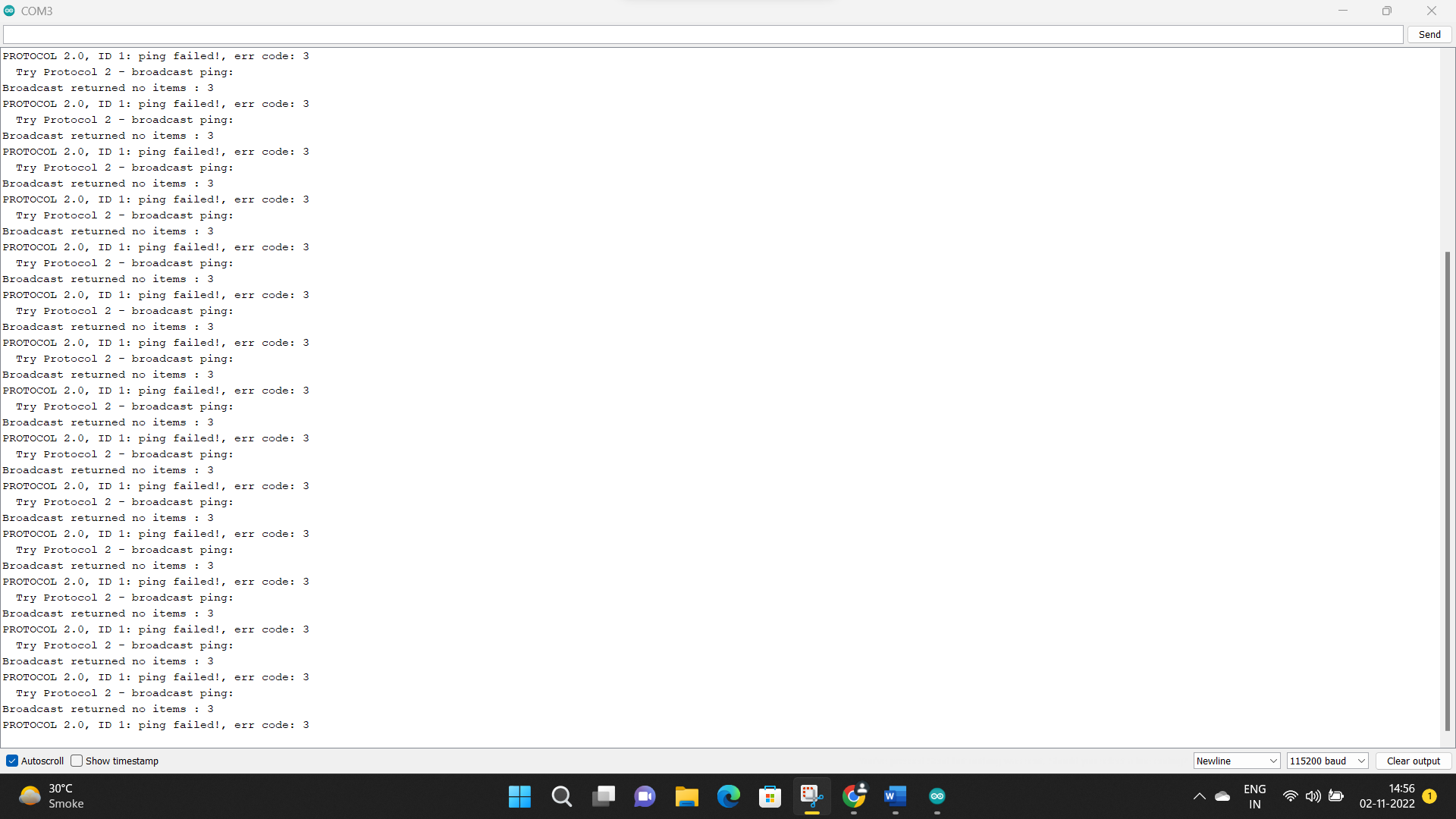
2. Arduino Leonardo & Dynamixel shield
As we are not able get serial data from arduino UNO, we used Arduino Leonardo. With the help Leonardo we are getting serial data but still motor is not able to communicating with shield. you can refer the below screenshot.
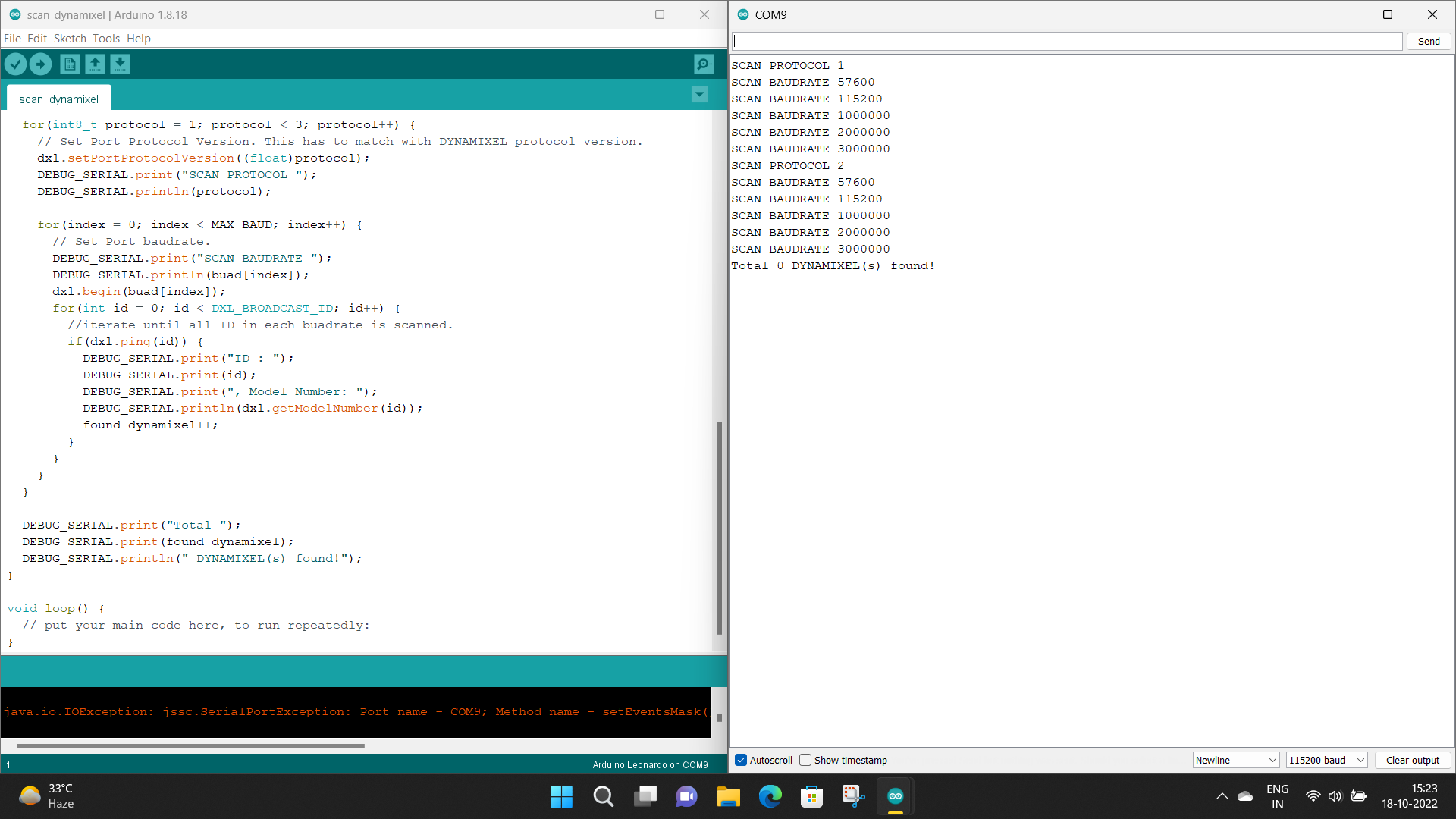
when we upload scan_dynamixel code motor is not able to communicate with dynamixel shield in Leonardo also. you can refer the attached video link -https://drive.google.com/file/d/1vxdqjKEZ0BfCczaY1_hRWr7HW6__7lpA/view?usp=sharing
3. Only Arduino UNO
With only arduino we are not getting serial data but motor is running. We used this library (GitHub - jumejume1/AX-12A-servo-library) in code. you can refer the below image.
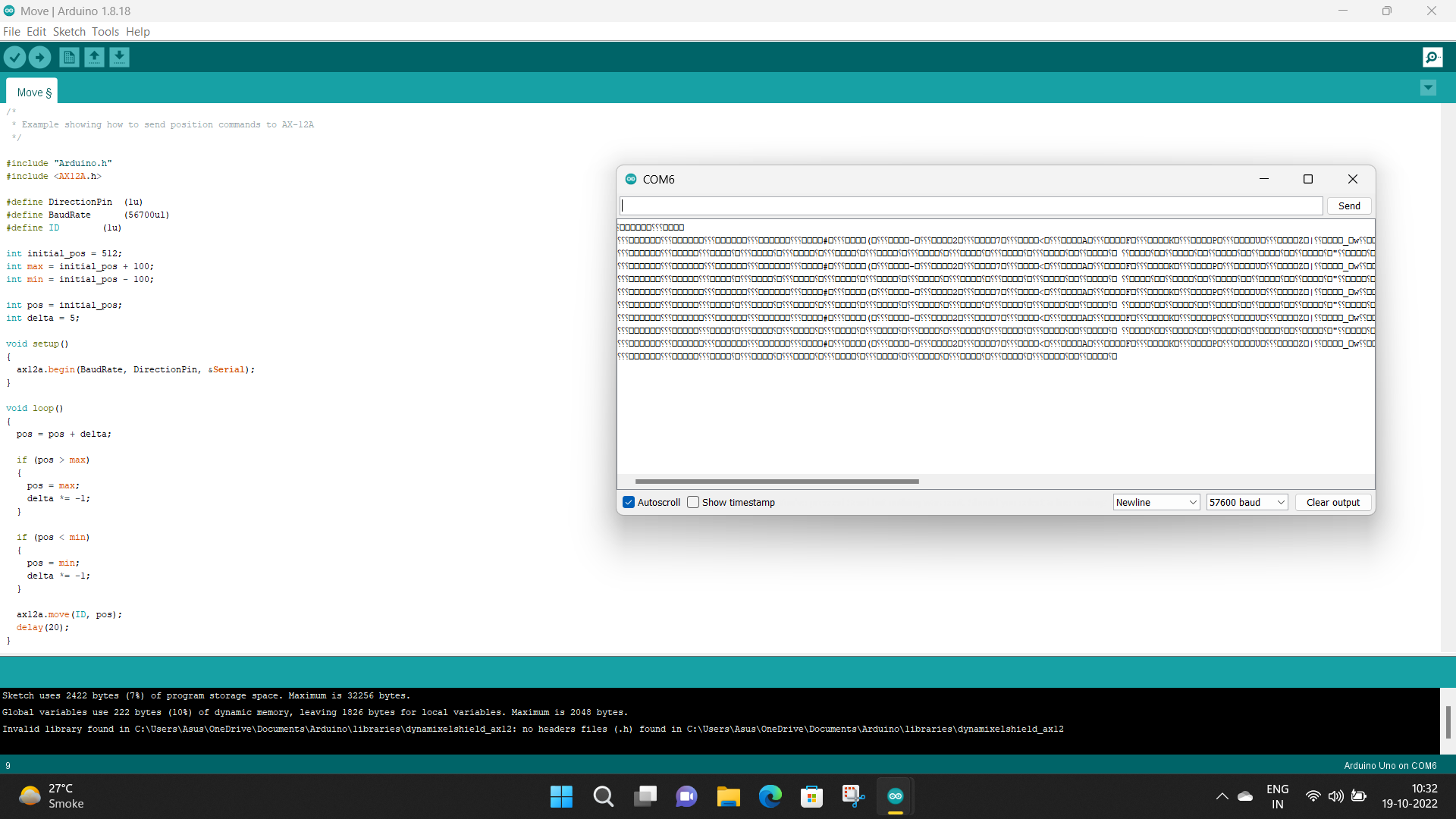
also you can refer the attached video link -
https://drive.google.com/file/d/1zqOrHTAfDPqGQ-b6yLJfgY1-dRUElVuE/view?usp=sharing
What should I do now to establish communication between dynamixel shield and AX-12A?