I implemented the approach of assigning a fake Product Number and the default ID=200 in order to fake out TASK 3 - Debug Tool into thinking that it is talking to a real CM controller did not work out for my setup. The program did compile and uploaded OK to my MKR ZERO. But when I tried to connect TASK 3 to my BT-210 (via SERCOM3), the BT-210 blinked solid blue only for about 1 second, then it got rejected by TASK 3. So may be, Dynamixel Wizard can be fooled by this scheme, but not TASK 3, it looks like.
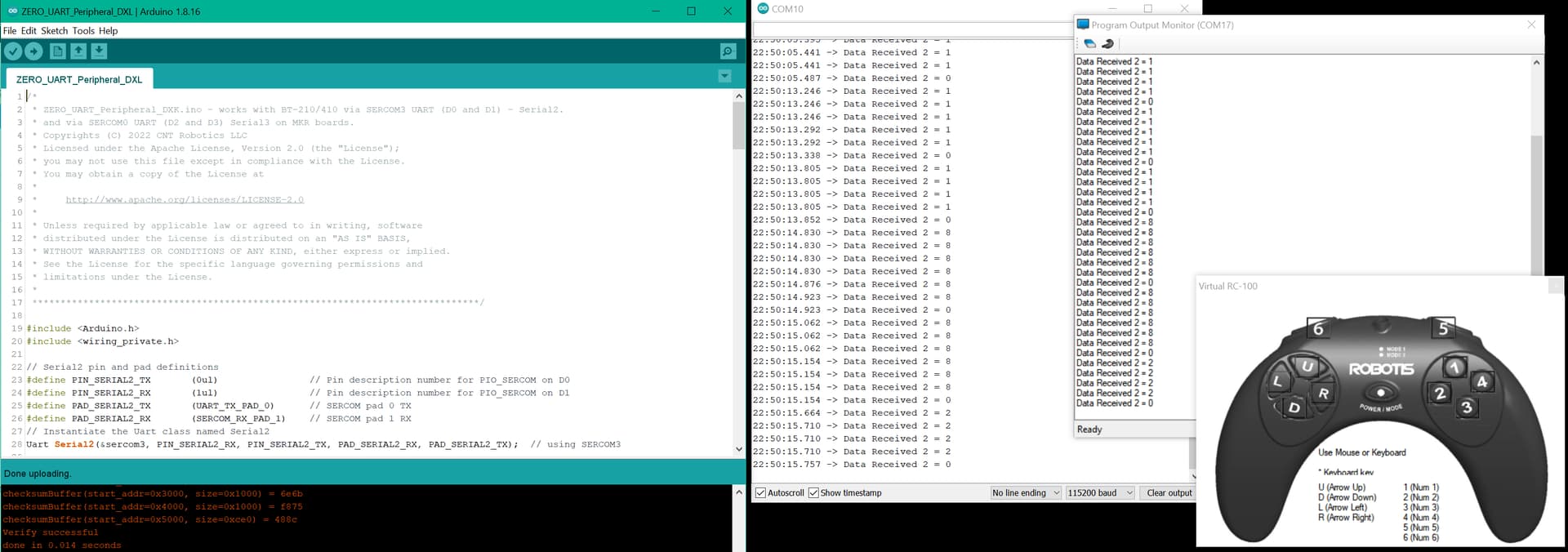
Luckily TASK 2 Output Monitor (previously mentioned), and even TASK 1 Output Monitor worked for me! (see pic below). So things are working out well enough for me.
Interesting exercise, though! This may be handy for other projects, but not for this one.
The main conclusion is that if one has a MKR ZERO, and some BT-210 or BT-410 available, then one can set up a wireless control feature for one’s robot as shown above.