지금 터틀봇3 와플파이에서 xm540-w270-t모터로 교체 할려고 위자드에서 id 1,2와 통신속도 115200으로 맞춰서 세팅하였고 (TurtleBot3) 이 링크에 있는 방식대로 했는데 모터를 못 찾던데 추가로 세팅해줘야 할 부분이 있을까요?
bool findMotor(int id)
{
uint32_t baud_tbl[2] = { 57600, 1000000 };
#define COUNT_BAUD (sizeof(baud_tbl)/sizeof(baud_tbl[0]))
uint32_t index;
uint32_t baud_pre;std::vector vec;
baud_pre = portHandler->getBaudRate();
tb3_id = -1;
CMD_SERIAL.println(“Find Motor…”);
// First try to find the specific servo ID wanted
for (index = 0; index < COUNT_BAUD; index++)
{
portHandler->setBaudRate(baud_tbl[index]);
uint16_t model_number;
int dxl_comm_result = packetHandler2->ping(portHandler, id, &model_number);
if (dxl_comm_result == COMM_SUCCESS)
{
if (tb3_id == -1)
{
tb3_id = id;
tb3_baud = baud_tbl[index];
}
else
{
CMD_SERIAL.printf(“Warning Servo %d found at two baud rates %d and %d using %d\n”,
id, tb3_baud, baud_tbl[index], baud_tbl[index]);
tb3_baud = baud_tbl[index];
}
}
}
baudrate를 57600, 1000000으로 설정 후 해보시겠어요?
알려주셔서 감사합니다 그런데 기존 소스 코드에 동일하게 되어있고 다른 값으로도 바꿔봤지만 똑같이 뜹니다 그리고 로보티즈에서 소스 코드 변경 없이 된다고 하던데 위자드에서 모터 세팅을 어떤 부분들을 수정 해야하는지 알려주실 수 있을까요?
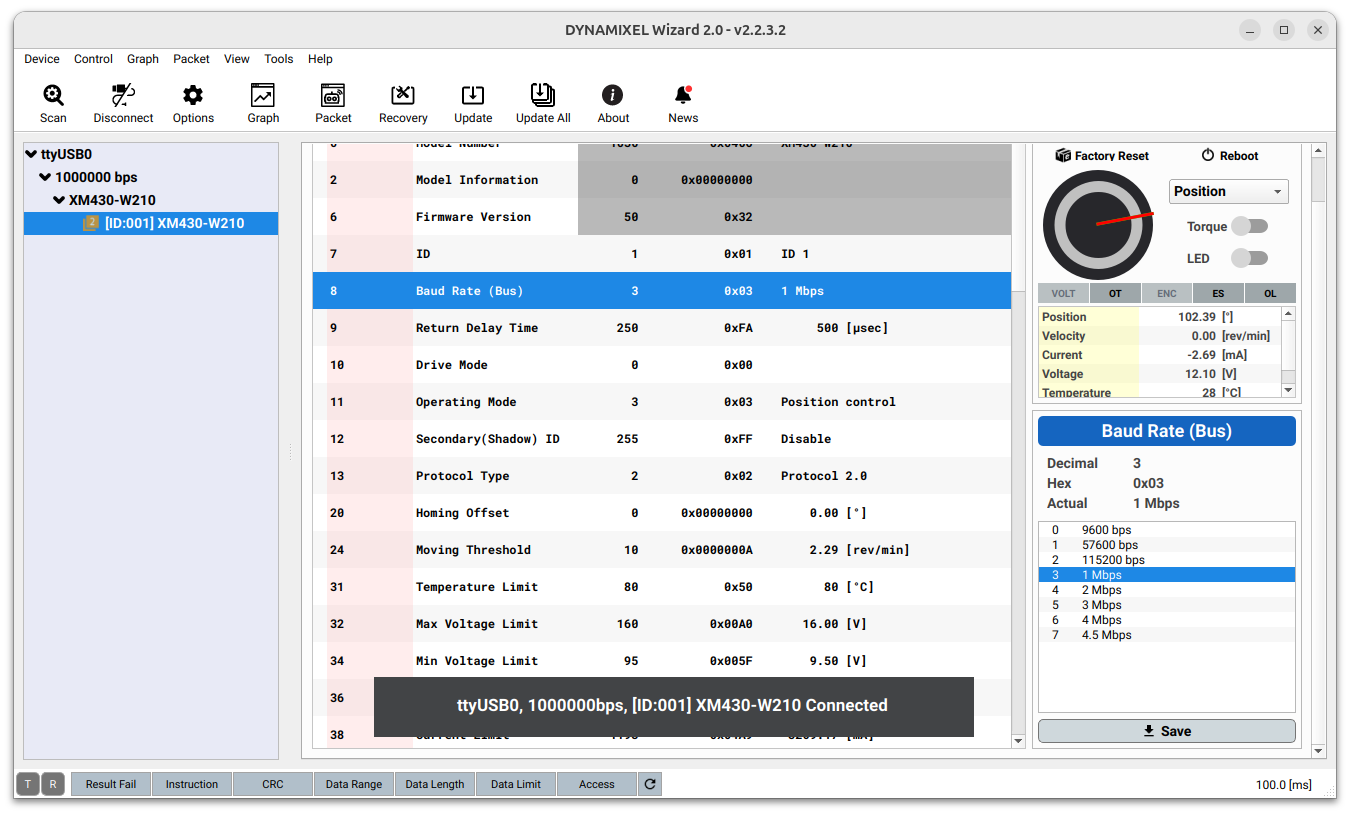
위자드에서 baud rate를 수정한다면 Setup DYNAMIXELs for TurtleBot3 에서 다이나믹셀들을 검색할 수 있고, 나머지 세팅을 해줄거라 예상합니다.
답변 감사합니다 계속 질문을 드려서 죄송하지만 모터를 계속 못 찾고 있는데 OPEN CR에 SMPS 12V 5A 를 연결 하였는데 보드 회로에 문제가 생겨서 못 찾는걸까요?
Opencr로 위자드를 연결하기 위해선 opencr의 펌웨어를 교체해야합니다.
를 보시고 펌웨어를 교체한 후 위자드로 검색해보세요!
감사합니다 보드 문제는 아니네요 그리고 터틀봇 E메뉴얼에 있는걸로 처음 부터 다시 했지만 인식을 못 하네요;;; 더 찾아봤는데 turtlebot3_motor_driver.h라는 파일에서 제가 쓸 모터에 값을 넣으면 된다는데 이것도 맞는건가요? OpenCR/arduino/opencr_arduino/opencr/libraries/turtlebot3/include/turtlebot3/turtlebot3_motor_driver.h at master · ROBOTIS-GIT/OpenCR · GitHub