Currently, I have configured the manipulator x only with xl430 w250. I modified id and baud rate with dynamicixel wizard. After that, an error occurred in the following code while following the manual.
The following is a problem when you run the above code.
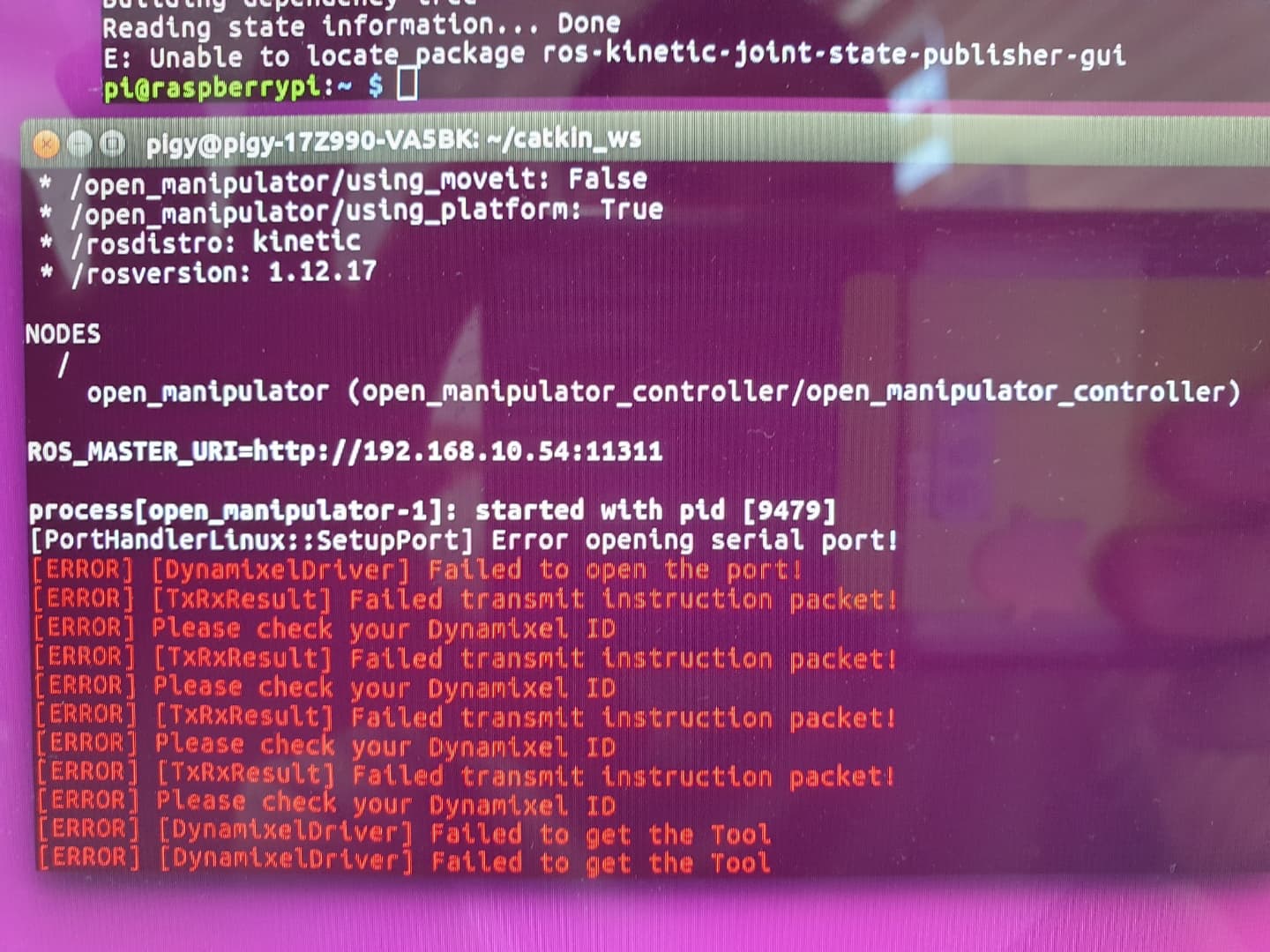
I’m using open cr. os is kinetic.
The error that you are receiving in that screenshot indicates that the serial port was unable to be opened, there are a few possible reasons that this could occur:
- Do you have permissions to interface with the USB device? If you are able to succesfully run the command as sudo, then the issue is that your user does not have permission to access the USB device.
- Is the USB device name the same as the one in the tutorial? It is possible that the USB device does not have the same name on your device as it does in the tutorial, in that case you will have to change the specified USB device name.
1 Like
Also, make sure to upload the correct Arduino example usb_to_dxl to OpenCR so that the OpenCR can work as a USB-DYNAMIXEL communication interface like U2D2.
1 Like