Hello everybody!
This is the fourth update from Anteater Dynamics. Significant progress has been made since our last update.
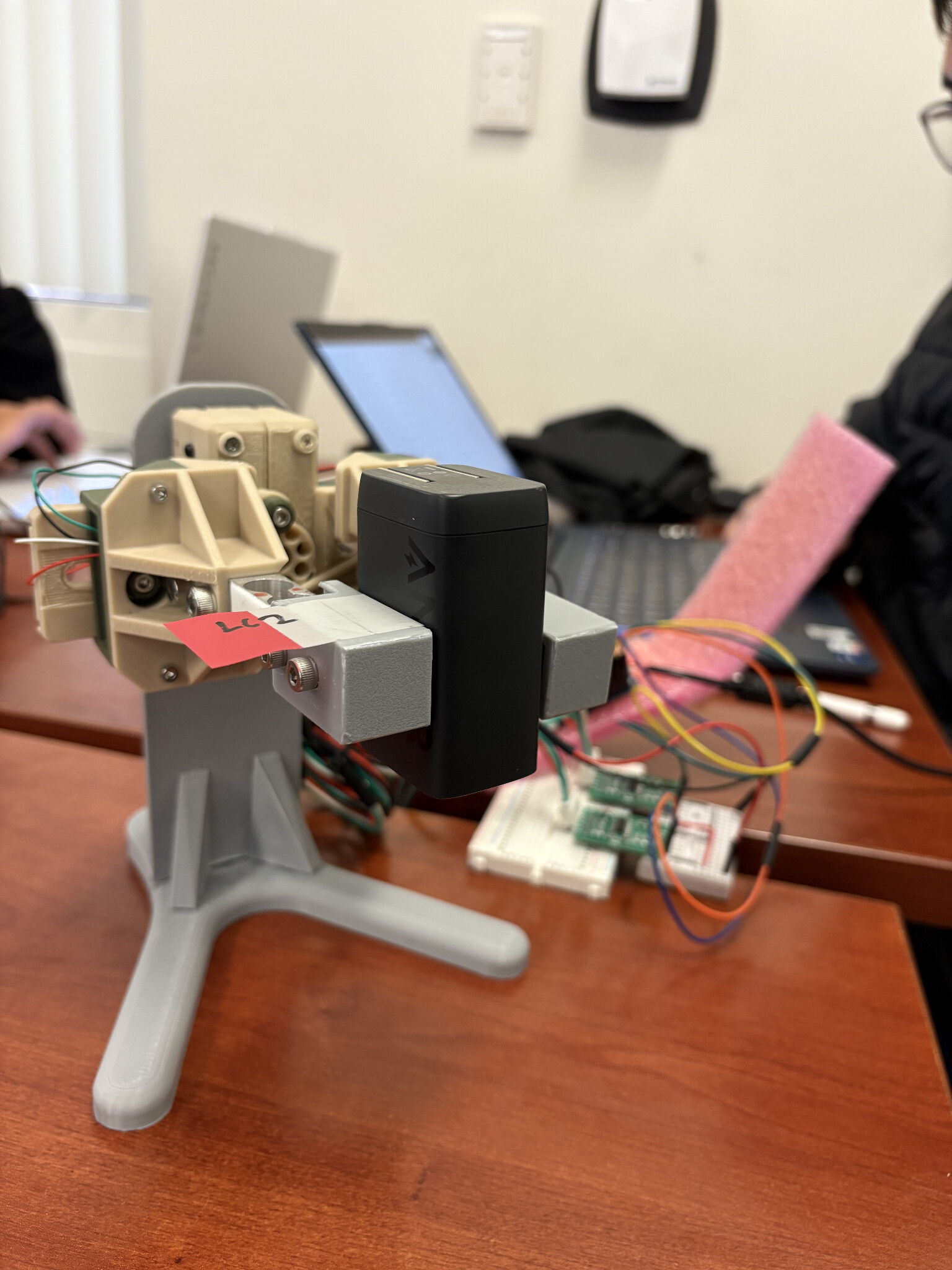
The team presented the PoC models at our school’s annual design review. Below are images of the end-effector model holding and gripping two objects.
While not shown in the picture, the end-effector was successful in sensing how much force was being exerted on the object via feedback from the load-cells. Unfortunately, this model was not able to identify whether it was gripping a “soft” or “hard” object, and is something our team is actively trying to solve.
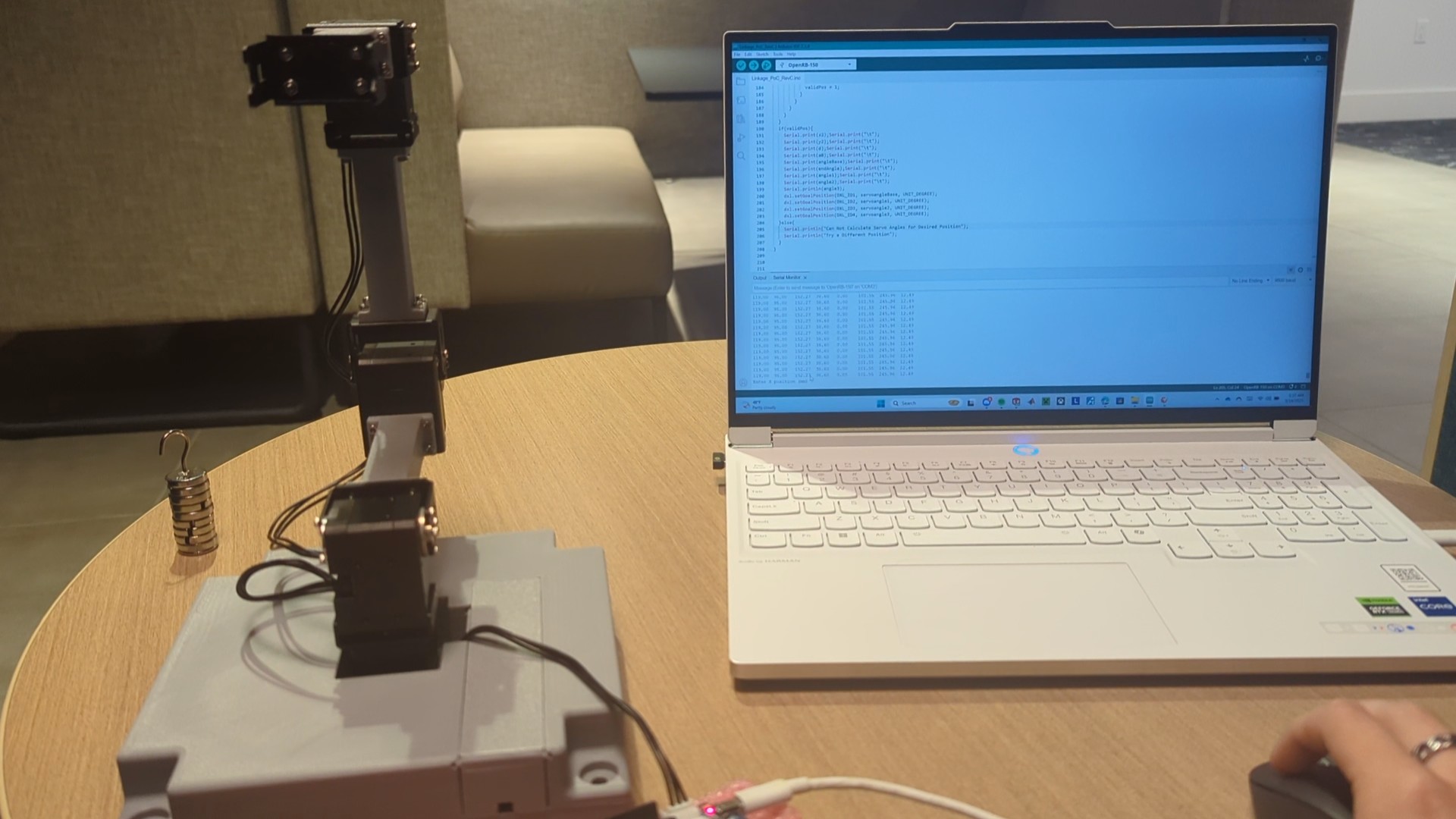
Below are images of our robotic arm linkage in different poses:
The linkage arm was successful in maintaining its position after having an added load attached to its end. Some issues were noted, including the need for better cable management between the different Dynamixels. For example, the wires near the base wrapped around the linkage, preventing our robotic arm linkage from freely rotating 360 degrees about the base. One of our goals for the final prototype is internal wiring as well as adding shrouds to reduce the amount of exposed wires.
Mechanical
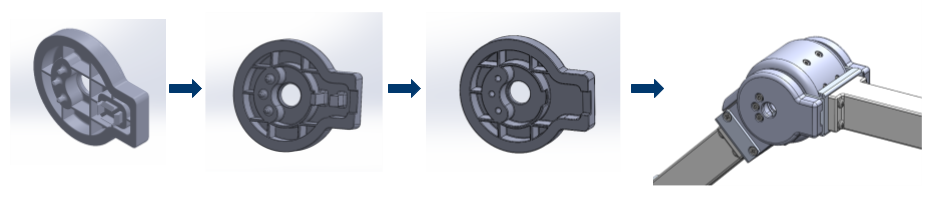
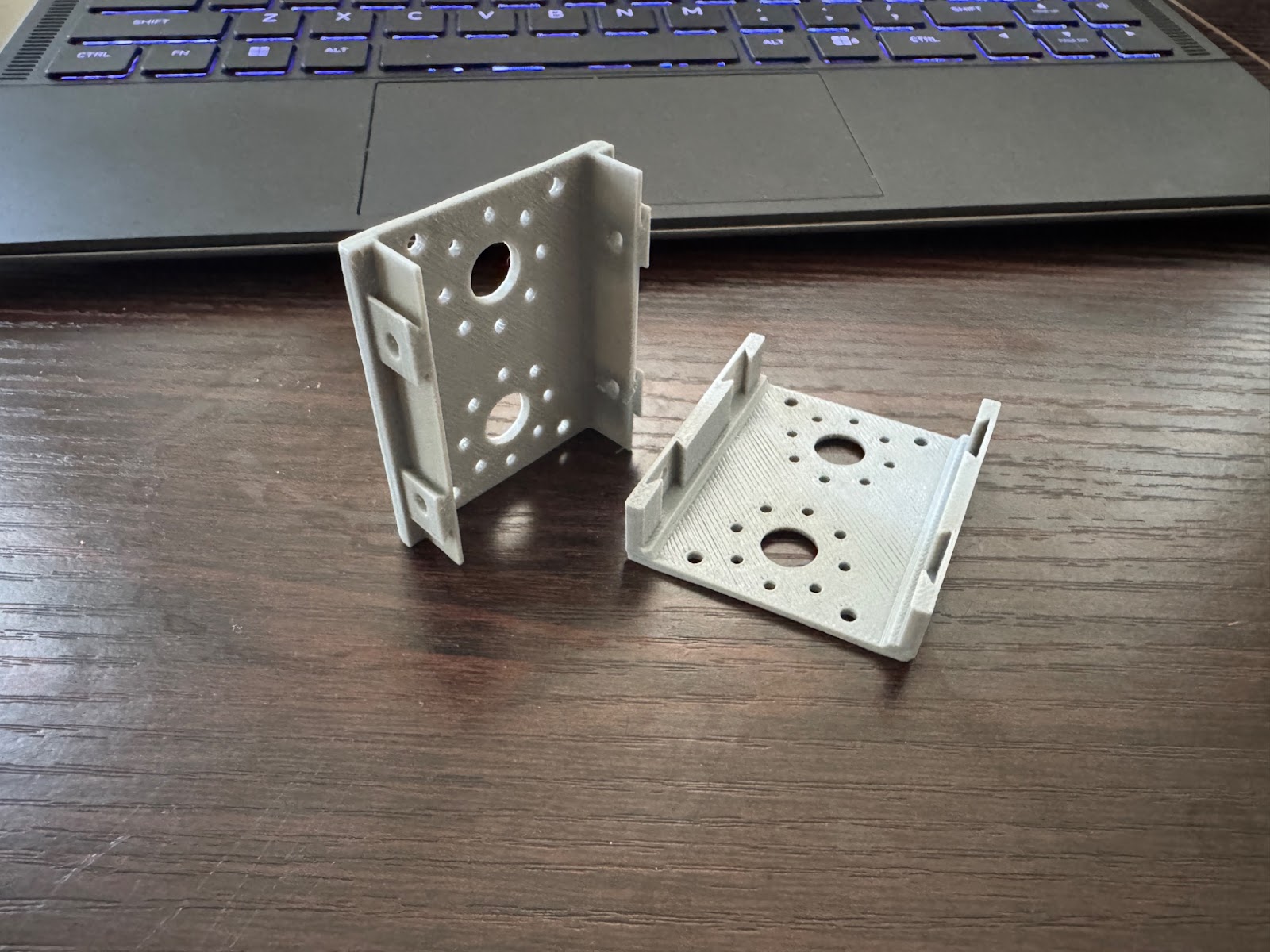
Our mechanical team has been working on new components for the final prototype. Attached below are images of the joint shrouds mentioned earlier to reduce wire exposure. The first iterations tried to use a snap fit model to attach to the servos, but given the constraints of FDM 3D-printing and its loose tolerances, we ultimately decided to use fasteners to attach the shrouds.
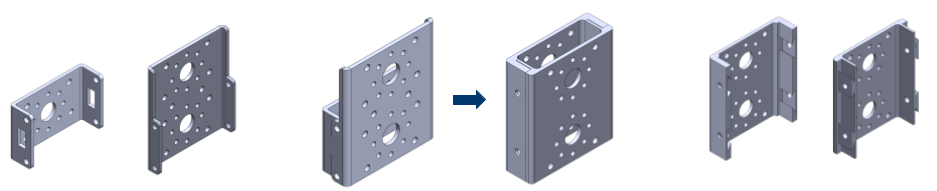
Additionally, work has been done to improve the design of the custom-made wrist bracket attaching the end-effector to the rest of the arm linkage. On the left is the model of an off-the-shelf aluminum bracket. We wanted to avoid any stress or issues with cantilevering, given that our bracket will be 3D Printed, hence the uniform design.
Software
Our software team is currently working on developing a kinematic model for our complete 7DOF prototype, as well as further developing the logic behind the load-cells sensor feedback. Currently, the end-effector is successful at reading the force exerted on the object it is gripping, but cannot distinguish whether or not it is sensing a “hard” or a “soft” object.
Next Week’s Goals
- Continue research and development for end-effector test objects.
- Update the base design to ensure proper packaging of the Open-RB150 controller
- Continue assembly and manufacturing of the finalized components.
- Continued development of the forward kinematics model
- Continued troubleshooting and developing of sensor logic for the load cells.
- Begin integration of the end-effector and arm-linkage sub-systems.
Some of the challenges we face are issues with tolerancing and fitting of the manufactured parts. On the software side, we expect further challenges in finding different methods of identifying soft/hard objects, as well as fully implementing the forward kinematics model to understand the robot’s geometry.