For a project of ours where we controlled 100 servomotors in position, we started to notice that some of them did not respond to the commands to read the internal parameters. They execute the positioning command, but then do not return the readings of the internal parameters (voltage, position, alarms, etc.).
Up to now, we have never had any problems managing the BUS with 100 motors, but in the last few months, on the latest supply of motors, we have noticed this anomaly on some servos.
I have also verified that up to 7 servomotors connected on the BUS the anomalous devices respond correctly, from the eighth onwards they start to respond badly or not at all.
The voltage applied is 11.1V
What could this new malfunction be due to ?
Would you be able to share some details about the connection setup you’re using for this application? The symptoms you are reporting sounds like the servomotors aren’t getting enough current at the further ends of the daisy chain in order to operate correctly.
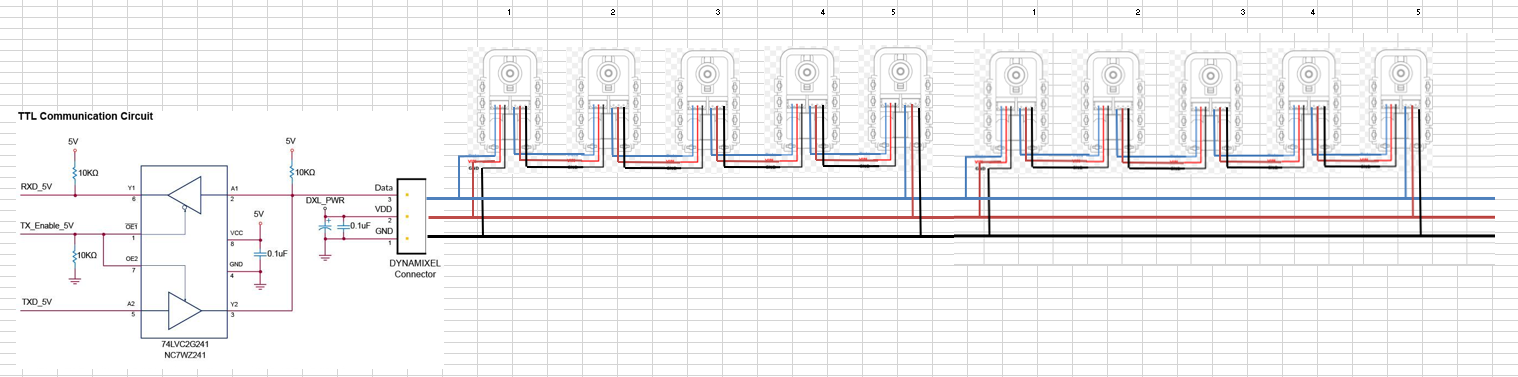
We used 74LS241 with a 10K pull-up resistor (towards 5V) on the data line. Our daisy chain has a maximum of 72 servomotors connected as in the picture below. For every 5 servos, the power supply and data line is replicated.
We are aware that so many motors in cascade is a stretch for the type of BUS, but so far we have had no problems handling the daisy chain in this way. Only with the latest deliveries have we encountered problems. Another anomaly is that with this latest supply of servomotors we cannot even manage a daisy chain of more than 7 servomotors. That is the real oddity of this situation.
It does look like you’re following all of our DYNAMIXEL network best practices, so this is looking just as puzzling to me as it is to you.
Do these issues occur to the same specific DYNAMIXEL units? It’s possible that the new servos that are giving you issues are defective or damaged in some way.
To communicate with the farthest DXLs, perhaps you may have to convert the 5V TTL to RS-485 via a Communication Bridge for a longer transmission line then reconvert it back to TTL when you are about to reach those far DXLs?
Is it possible that the servos, as a result of a power surge, have damaged the transmission buffer part? I suspected this because the abnormal servos correctly receive the positioning commands (executing them), but the responses to the commands generate a dampened signal on the BUS as if the individual servo could not properly drive the BUS line with more than 6 or 7 motors connected. This makes me suspect a break in the drive stage of the abnormal servo data line.
Damage to the transmission buffer is certainly possible if there was a high voltage spike along the serial line. If that is indeed the case, then the only remedy would be to submit the damaged servos to us for RMA service.