ubuntu@ubuntu:~$ roslaunch turtlebot3_bringup turtlebot3_robot.launch
… logging to /home/ubuntu/.ros/log/021fca42-f3ad-11ed-9d3f-c83dd465bfa7/roslaunch-ubuntu-2301.log
Checking log directory for disk usage. This may take a while.
Press Ctrl-C to interrupt
Done checking log file disk usage. Usage is <1GB.
started roslaunch server http://192.168.61.187:35545/
SUMMARY
PARAMETERS
- /rosdistro: melodic
- /rosversion: 1.14.10
- /turtlebot3_core/baud: 115200
- /turtlebot3_core/port: /dev/ttyACM0
- /turtlebot3_core/tf_prefix:
- /turtlebot3_lds/frame_id: base_scan
- /turtlebot3_lds/port: /dev/ttyUSB0
NODES
/
turtlebot3_core (rosserial_python/serial_node.py)
turtlebot3_diagnostics (turtlebot3_bringup/turtlebot3_diagnostics)
turtlebot3_lds (hls_lfcd_lds_driver/hlds_laser_publisher)
ROS_MASTER_URI=http://192.168.61.164:11311
process[turtlebot3_core-1]: started with pid [2310]
process[turtlebot3_lds-2]: started with pid [2311]
process[turtlebot3_diagnostics-3]: started with pid [2312]
[INFO] [1684216100.935510]: ROS Serial Python Node
[INFO] [1684216101.056369]: Connecting to /dev/ttyACM0 at 115200 baud
[INFO] [1684216103.203027]: Requesting topics…
[INFO] [1684216103.295627]: Note: publish buffer size is 1024 bytes
[INFO] [1684216103.321543]: Setup publisher on sensor_state [turtlebot3_msgs/SensorState]
[INFO] [1684216103.375564]: Setup publisher on firmware_version [turtlebot3_msgs/VersionInfo]
[INFO] [1684216104.013301]: Setup publisher on imu [sensor_msgs/Imu]
[INFO] [1684216104.061038]: Setup publisher on cmd_vel_rc100 [geometry_msgs/Twist]
[INFO] [1684216104.370265]: Setup publisher on odom [nav_msgs/Odometry]
[INFO] [1684216104.470047]: Setup publisher on joint_states [sensor_msgs/JointState]
[INFO] [1684216104.514156]: Setup publisher on battery_state [sensor_msgs/BatteryState]
[INFO] [1684216104.562306]: Setup publisher on magnetic_field [sensor_msgs/MagneticField]
[INFO] [1684216107.340736]: Setup publisher on /tf [tf/tfMessage]
[INFO] [1684216107.535306]: Note: subscribe buffer size is 1024 bytes
[INFO] [1684216107.561533]: Setup subscriber on cmd_vel [geometry_msgs/Twist]
[INFO] [1684216107.621173]: Setup subscriber on sound [turtlebot3_msgs/Sound]
[INFO] [1684216107.685457]: Setup subscriber on motor_power [std_msgs/Bool]
[INFO] [1684216107.753399]: Setup subscriber on reset [std_msgs/Empty]
[WARN] [1684216107.804414]: Failed to get param: timeout expired
[INFO] [1684216107.835099]: Setup TF on Odometry [odom]
[INFO] [1684216107.859878]: Setup TF on IMU [imu_link]
[INFO] [1684216107.887358]: Setup TF on MagneticField [mag_link]
[INFO] [1684216107.919770]: Setup TF on JointState [base_link]
[INFO] [1684216107.971009]: --------------------------
[INFO] [1684216108.002886]: Connected to OpenCR board!
[INFO] [1684216108.030975]: This core(v1.2.2) is compatible with TB3 Burger
[INFO] [1684216108.059094]: --------------------------
[INFO] [1684216108.087005]: Start Calibration of Gyro
[INFO] [1684216108.115519]: Calibration End
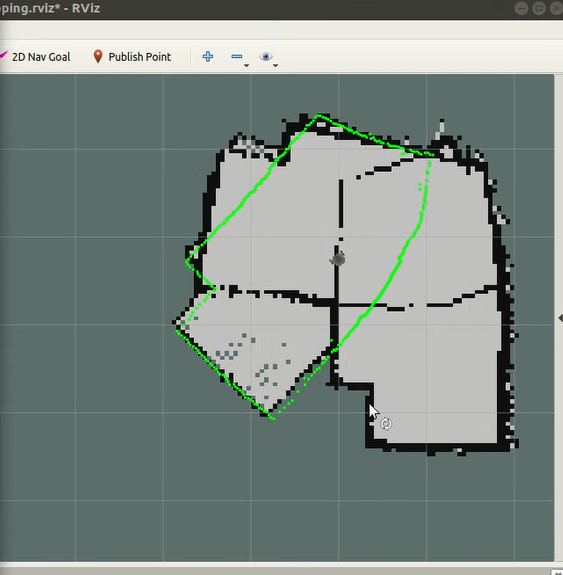
[WARN] [1684216107.804414]: Failed to get param: timeout expired ==>> bringup할때 이런 에러가 나지 않아야 뒤에 slam이나 다른걸 할때 오류가 안나는걸로 아는데 해결방법 없을까요??
그리고 저 메시지가 나와서 slam과 Rviz에서 Nav Goal을 하는데 터틀봇 버거가 위치추정을 못하고 계속 맵이 뒤죽박죽 입니다.