hello,
I am using XC 430-W240 with Arduino uno and DYNAMIXEL shield. And I am uploading codes using Arduino IDE. I am feeding the Arduino using 12V DC Adapter.
when I connected the motor to U2D2 Connector, I Could control it fully using DYNAMIXEL WIZARD 2.0. But when I use arduino IDE I cannot run even a simple code like the code below. I have checked the power, cables, shield, and Arduino uno. they are all working properly.
Can you help me please?
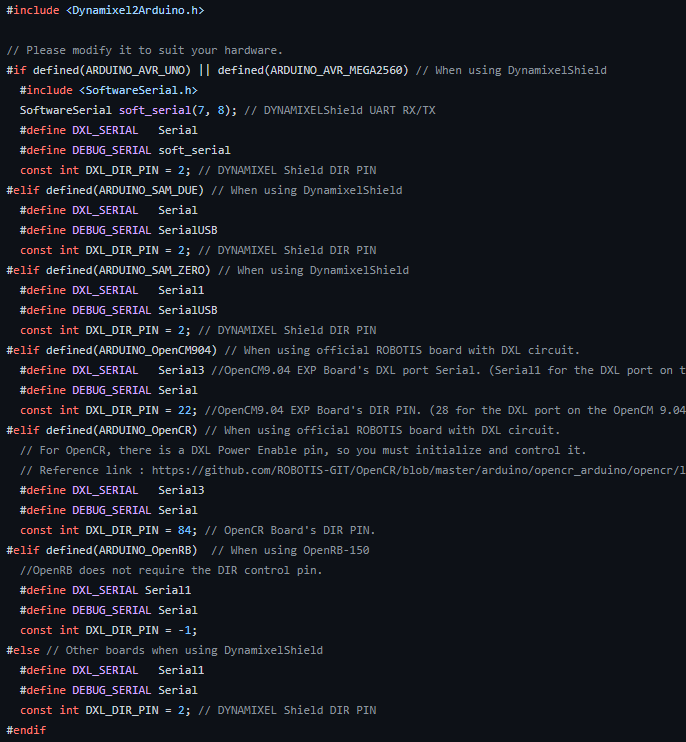
#include <DynamixelShield.h>
#if defined(ARDUINO_AVR_UNO) || defined(ARDUINO_AVR_MEGA2560)
#include <SoftwareSerial.h>
SoftwareSerial soft_serial(7, 8); // DYNAMIXELShield UART RX/TX
#define DEBUG_SERIAL soft_serial
#elif defined(ARDUINO_SAM_DUE) || defined(ARDUINO_SAM_ZERO)
#define DEBUG_SERIAL SerialUSB
#else
#define DEBUG_SERIAL Serial
#endif
//Please see eManual Control Table section of your DYNAMIXEL.
//This example is written for DYNAMIXEL X series(excluding XL-320)
#define OPERATING_MODE_ADDR 11
#define OPERATING_MODE_ADDR_LEN 1
#define TORQUE_ENABLE_ADDR 64
#define TORQUE_ENABLE_ADDR_LEN 1
#define LED_ADDR 65
#define LED_ADDR_LEN 1
#define GOAL_POSITION_ADDR 116
#define GOAL_POSITION_ADDR_LEN 4
#define PRESENT_POSITION_ADDR 132
#define PRESENT_POSITION_ADDR_LEN 4
#define POSITION_CONTROL_MODE 3
#define TIMEOUT 10 //default communication timeout 10ms
uint8_t turn_on = 1;
uint8_t turn_off = 0;
const uint8_t DXL_ID = 1;
const float DXL_PROTOCOL_VERSION = 2.0;
uint8_t operatingMode = POSITION_CONTROL_MODE;
uint32_t goalPosition1 = 512;
uint32_t goalPosition2 = 2048;
DynamixelShield dxl;
void setup() {
// put your setup code here, to run once:
// For Uno, Nano, Mini, and Mega, use UART port of DYNAMIXEL Shield to debug.
DEBUG_SERIAL.begin(115200); //Set debugging port baudrate to 115200bps
while(!DEBUG_SERIAL); //Wait until the serial port for terminal is opened
// Set Port baudrate to 57600bps. This has to match with DYNAMIXEL baudrate.
dxl.begin(57600);
// Set Port Protocol Version. This has to match with DYNAMIXEL protocol version.
dxl.setPortProtocolVersion(DXL_PROTOCOL_VERSION);
// Turn off torque when configuring items in EEPROM area
if(dxl.write(DXL_ID, TORQUE_ENABLE_ADDR, (uint8_t*)&turn_off , TORQUE_ENABLE_ADDR_LEN, TIMEOUT))
DEBUG_SERIAL.println(“DYNAMIXEL Torque off”);
else
DEBUG_SERIAL.println(“Error: Torque off failed”);
// Set Operating Mode
if(dxl.write(DXL_ID, OPERATING_MODE_ADDR, (uint8_t*)&operatingMode, OPERATING_MODE_ADDR_LEN, TIMEOUT))
DEBUG_SERIAL.println(“Set operating mode”);
else
DEBUG_SERIAL.println(“Error: Set operating mode failed”);
// Turn on torque
if(dxl.write(DXL_ID, TORQUE_ENABLE_ADDR, (uint8_t*)&turn_on, TORQUE_ENABLE_ADDR_LEN, TIMEOUT))
DEBUG_SERIAL.println(“Torque on”);
else
DEBUG_SERIAL.println(“Error: Torque on failed”);
}
void loop() {
// put your main code here, to run repeatedly:
// LED On
DEBUG_SERIAL.println(“LED ON”);
dxl.write(DXL_ID, LED_ADDR, (uint8_t*)&turn_on, LED_ADDR_LEN, TIMEOUT);
delay(500);
// Please refer to e-Manual(DYNAMIXEL Shield) for available range of value.
// Set Goal Position
DEBUG_SERIAL.print("Goal Position : ");
DEBUG_SERIAL.println(goalPosition1);
dxl.write(DXL_ID, GOAL_POSITION_ADDR, (uint8_t*)&goalPosition1, GOAL_POSITION_ADDR_LEN, TIMEOUT);
delay(1000);
// LED Off
DEBUG_SERIAL.println(“LED OFF”);
dxl.write(DXL_ID, LED_ADDR, (uint8_t*)&turn_off, LED_ADDR_LEN, TIMEOUT);
delay(500);
// Set Goal Position
DEBUG_SERIAL.print("Goal Position : ");
DEBUG_SERIAL.println(goalPosition2);
dxl.write(DXL_ID, GOAL_POSITION_ADDR, (uint8_t*)&goalPosition2, GOAL_POSITION_ADDR_LEN, TIMEOUT);
delay(1000);
}