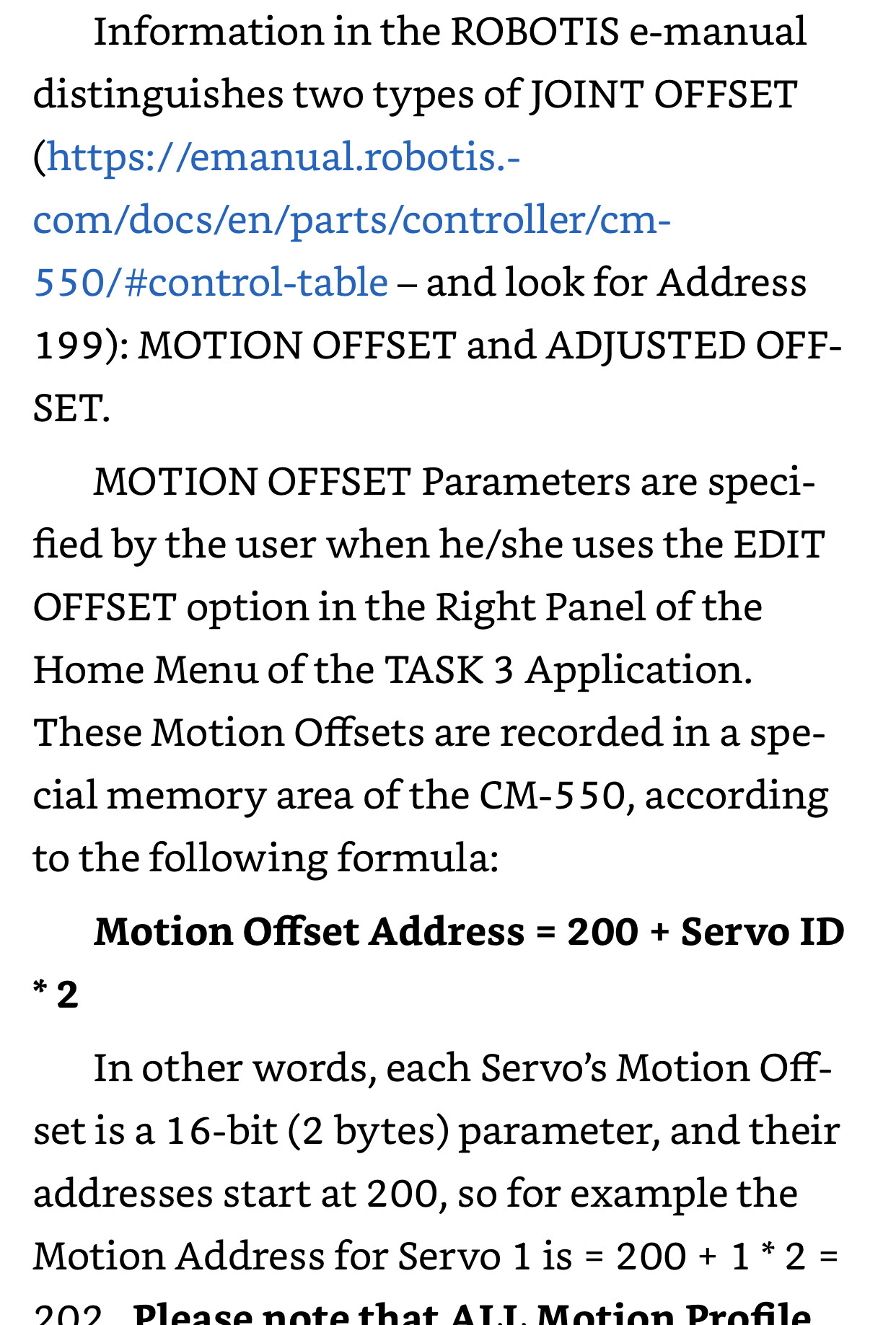
When using Bioloid Premium or GP, there is a technic that we can set the “Joint Offset” of certain ID to higher value (such as 1024), then when we call any motion index, then those certain ID will not move!
For example:
In this task code, the “Joint Offset” of ID 1 is set to 1024, so when the robot is moving the motion index 1, the motor ID 1 is not moving at all! This is very good. ^^
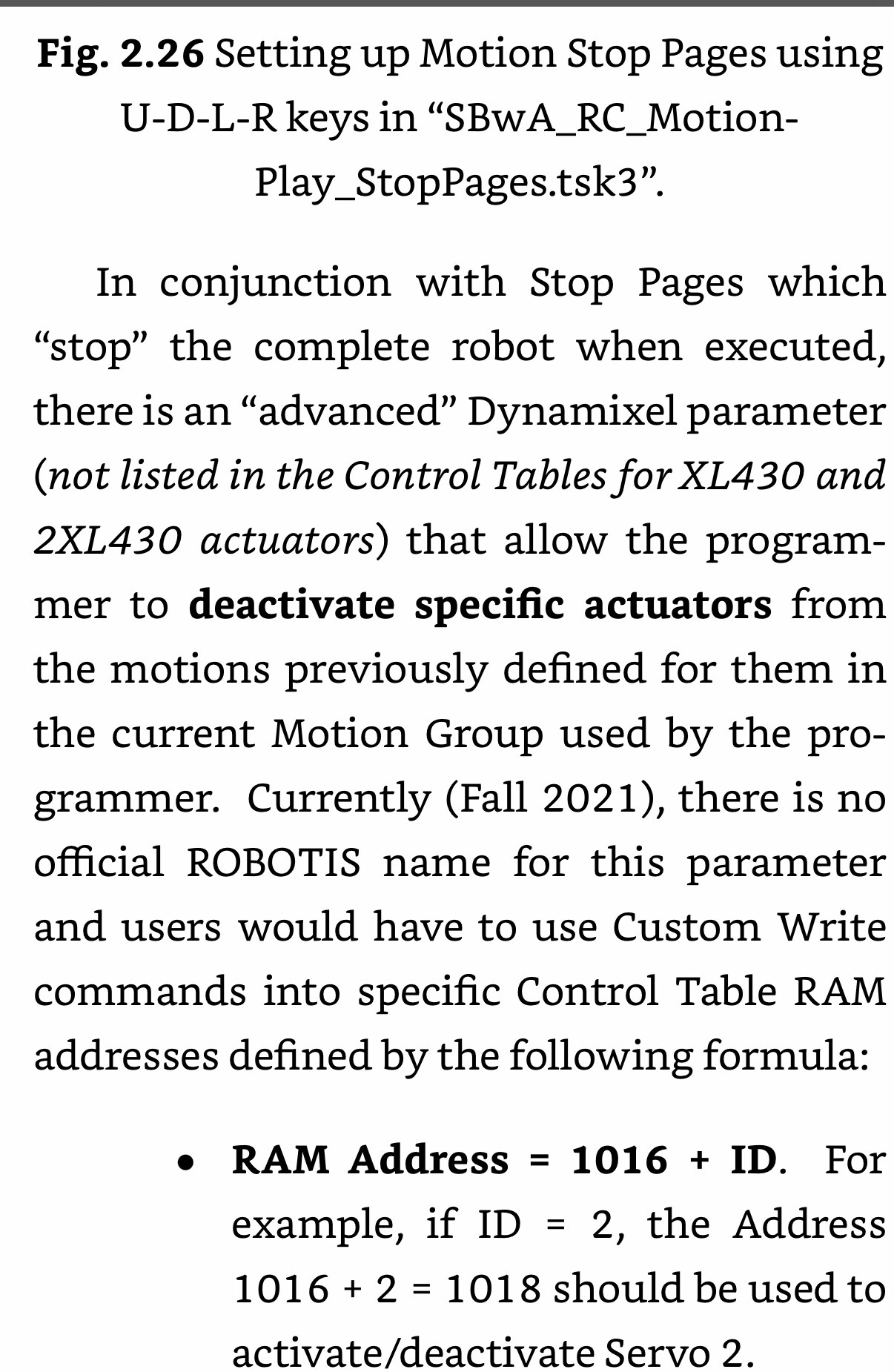
But in R+Task3.0 for Engineer Kit (MAX-E2), it is not working!
Once we set the “Joint Offset” of ID 1 to 4096 for MAX-E2, then when the robot is moving the motion index 1, the motor ID 1 is still moving!
Is this technic not appliable on Engineer Kit anymore? Or need to load any special number to the “Joint Offset”? Or any other technic to make similar effect?
The Joint Offset procedure has changed on the Engineer kit. You can check my book Projects Guide for Robotis Engineer combined edition on Amazon and read up on the free Kindle sample which has a section on programming the new joint offset
Thanks for your information. ^^
So, for Engineer kit, is there any technic that can disable certain IDs when call any motion index?
The details are in the free Kindle sample - subsection 2.1.6, after Fig. 2.26.
Thank you so much for your sharing. Even though I am not able to access the free Kindle sample of your book (maybe location limitation?), but with your information in your reply, I did successfully disable certain ID when calling motion on my Engineer Kit. Thank you very much ^^
1 Like
@Robotclub
Sorry! I thought that Amazon was accessible world wide. Glad the info worked for you too.