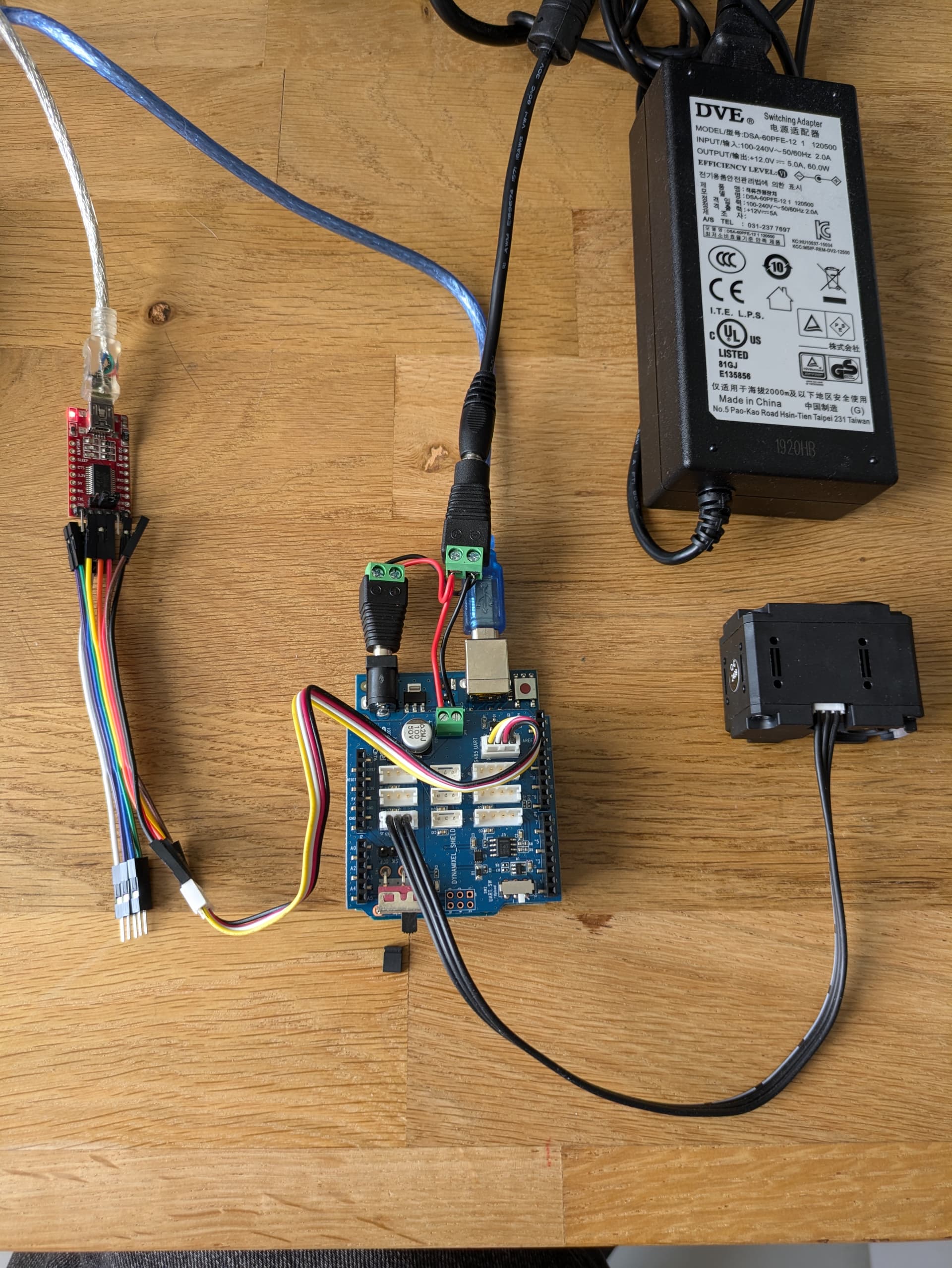
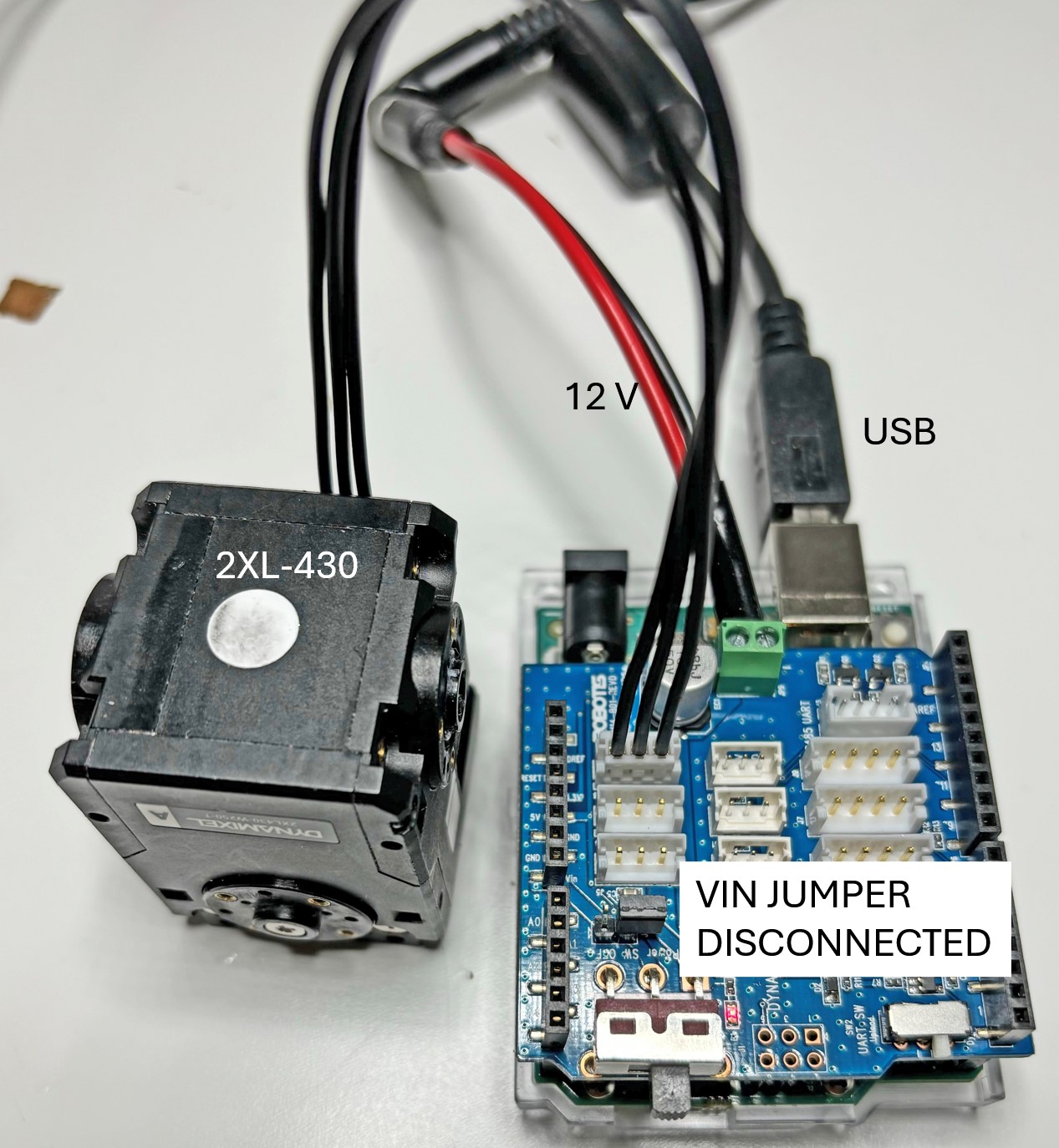
Hello @roboteer, I have the same problem as the poster above. Maybe someone can help me out. I have managed to control a Dynamixel XL430-W250 with an Arduino UNO R3, but not the R4. I was trying to figure out why the R4 doesn’t work, and now all of a sudden the R3 doesn’t work either.
I really don’t know what to do, I’ve proven that the UART works on the R3 and that it is sending signals fine. All of a sudden the motor just doesn’t want to respond. I have tried using all different baud rates and scanning for different IDs, but nothing has worked which is very strange considering it worked completely fine before.
I have been using the R4 as a debugging tool that reads over the software serial so that I can understand what’s going on. Here is my code for both arduinos:
Arduino UNO R3
/*******************************************************************************
* Copyright 2016 ROBOTIS CO., LTD.
*
* Licensed under the Apache License, Version 2.0 (the "License");
* you may not use this file except in compliance with the License.
* You may obtain a copy of the License at
*
* http://www.apache.org/licenses/LICENSE-2.0
*
* Unless required by applicable law or agreed to in writing, software
* distributed under the License is distributed on an "AS IS" BASIS,
* WITHOUT WARRANTIES OR CONDITIONS OF ANY KIND, either express or implied.
* See the License for the specific language governing permissions and
* limitations under the License.
*******************************************************************************/
#include <DynamixelShield.h>
#define BAUDRATE 57600 // Any Supported Protocol
#if defined(ARDUINO_MINIMA)
#define DEBUG_SERIAL Serial
#define DXL_SERIAL Serial1
#define DXL_DIR_PIN 2
#elif defined(ARDUINO_AVR_UNO) || defined(ARDUINO_AVR_MEGA2560)
#include <SoftwareSerial.h>
SoftwareSerial soft_serial(7, 8); // DYNAMIXELShield UART Connector RX/TX
#define DEBUG_SERIAL soft_serial
#define DXL_SERIAL Serial
#elif defined(ARDUINO_SAM_DUE) || defined(ARDUINO_SAM_ZERO)
#define DEBUG_SERIAL SerialUSB
#else
#define DEBUG_SERIAL Serial
#endif
const uint8_t DXL_ID = 1;
const float DXL_PROTOCOL_VERSION = 2.0;
DynamixelShield dxl(DXL_SERIAL, DXL_DIR_PIN);
//This namespace is required to use Control table item names
using namespace ControlTableItem;
void setup() {
// For Uno, Nano, Mini, and Mega, use UART port of DYNAMIXEL Shield to debug.
DEBUG_SERIAL.begin(115200);
// Set Port baudrate to 57600bps. This has to match with DYNAMIXEL baudrate.
dxl.begin(57600);
delay(100);
// Set Port Protocol Version. This has to match with DYNAMIXEL protocol version.
dxl.setPortProtocolVersion(DXL_PROTOCOL_VERSION);
// Debugging initialisation of Serial communication.
debugSerial();
delay(600);
// Scanning for other baud rates on communication lines.
scanBaud();
delay(600);
// Get DYNAMIXEL information
pingScan(DXL_ID);
delay(600);
// Turn off torque when configuring items in EEPROM area
dxl.torqueOff(DXL_ID);
dxl.setOperatingMode(DXL_ID, OP_POSITION);
dxl.torqueOn(DXL_ID);
}
void loop() {
// Please refer to e-Manual(http://emanual.robotis.com/docs/en/parts/interface/dynamixel_shield/) for available range of value.
// Set Goal Position in RAW value
dxl.setGoalPosition(DXL_ID, 512);
delay(600);
// Print present position in raw value
DEBUG_SERIAL.print("Present Position(raw) : ");
DEBUG_SERIAL.println(dxl.getPresentPosition(DXL_ID));
delay(600);
// Set Goal Position in DEGREE value
dxl.setGoalPosition(DXL_ID, 5.7, UNIT_DEGREE);
delay(600);
// Print present position in degree value
DEBUG_SERIAL.print("Present Position(degree) : ");
DEBUG_SERIAL.println(dxl.getPresentPosition(DXL_ID, UNIT_DEGREE));
delay(600);
}
void scanBaud() {
const int32_t baud[10] = {2000000, 1000000, 500000, 400000, 250000, 200000, 115200, 57600, 19200, 9600};
const int8_t baud_len = 10;
int8_t index = 0;
uint8_t read_baudrate = 0;
for(index = 0; index < baud_len; index++){
// Set Port baudrate.
DEBUG_SERIAL.print("SCAN BAUDRATE ");
DEBUG_SERIAL.println(baud[index]);
dxl.begin(baud[index]);
delay(100);
if(dxl.ping(DXL_ID)) {
DEBUG_SERIAL.print("ID : ");
DEBUG_SERIAL.print(DXL_ID);
DEBUG_SERIAL.println(", Ping Succeed");
DEBUG_SERIAL.print("Set New Baudrate:");
DEBUG_SERIAL.println(BAUDRATE);
dxl.setBaud(DXL_ID, BAUDRATE);
dxl.begin(BAUDRATE);
// dxl.setPortProtocolVersion(DXL_PROTOCOL_VERSION);
break;
}
}
DEBUG_SERIAL.println("--------------------------");
}
void debugSerial() {
// DEBUG INFO
DEBUG_SERIAL.println("~~~~~~~~~~~~~~~~~~~~~~~~~~");
delay(100);
DEBUG_SERIAL.print("DXL_SERIAL : ");
DEBUG_SERIAL.println(DXL_SERIAL);
delay(100);
DEBUG_SERIAL.print("DXL_DIR_PIN : ");
DEBUG_SERIAL.println(DXL_DIR_PIN);
delay(100);
DEBUG_SERIAL.print("DXL_PROTOCOL_VERSION : ");
DEBUG_SERIAL.println(DXL_PROTOCOL_VERSION);
delay(100);
DEBUG_SERIAL.println();
delay(100);
DEBUG_SERIAL.print("Booting");
for(int i = 0; i < 15; i++) {
//delay(100);
DEBUG_SERIAL.print(".");
}
DEBUG_SERIAL.println(".");
DEBUG_SERIAL.println("--------------------------");
}
void pingScan(int ID) {
bool b_ping = dxl.ping(ID);
bool b_scan = dxl.scan();
DEBUG_SERIAL.print("DXL Ping Status: ");
DEBUG_SERIAL.println(b_ping);
delay(100);
DEBUG_SERIAL.print("DXL Scan Status: ");
DEBUG_SERIAL.println(b_scan);
delay(100);
DEBUG_SERIAL.println("--------------------------");
}
Arduino R4 Minima
String inputString = ""; // A string to hold incoming data from Serial11
bool stringComplete = false; // Whether the string is complete
void setup() {
// Start Serial (USB) for debugging, 9600 baud rate for this test
Serial.begin(9600);
while(!Serial);
Serial.println("Starting Serial Test");
// Start Serial1 (UART) for communication, 115200 baud rate for this test
Serial1.begin(115200);
}
void loop() {
// Check if any data is available from Serial11
if (Serial1.available()) {
// Read incoming characters until we hit a newline character
while (Serial1.available()) {
char inChar = (char)Serial1.read();
inputString += inChar; // Append the character to the input string
// If a newline is detected, the string is complete
if (inChar == '\n') {
stringComplete = true;
break;
}
}
}
// When a complete line is received, print it
if (stringComplete) {
Serial.print("Received from Serial1: ");
Serial.print(inputString); // Print the entire string received from Serial1
// Clear the input string and reset for the next line
inputString = "";
stringComplete = false;
}
}