Hi! This is Ali! Aerospace Ph.D. Candidate and Head of Advanced Technologies in PishRobot.
Recently, My colleagues in R&D, Designed a Cylindrical Manipulator powered by ROBOTIS DYNAMIXEL X Series.
The ARMC4X430 manipulator is fully compatible with ROS Official robotic platform, ROBOTIS TurtleBot3 - Waffle.
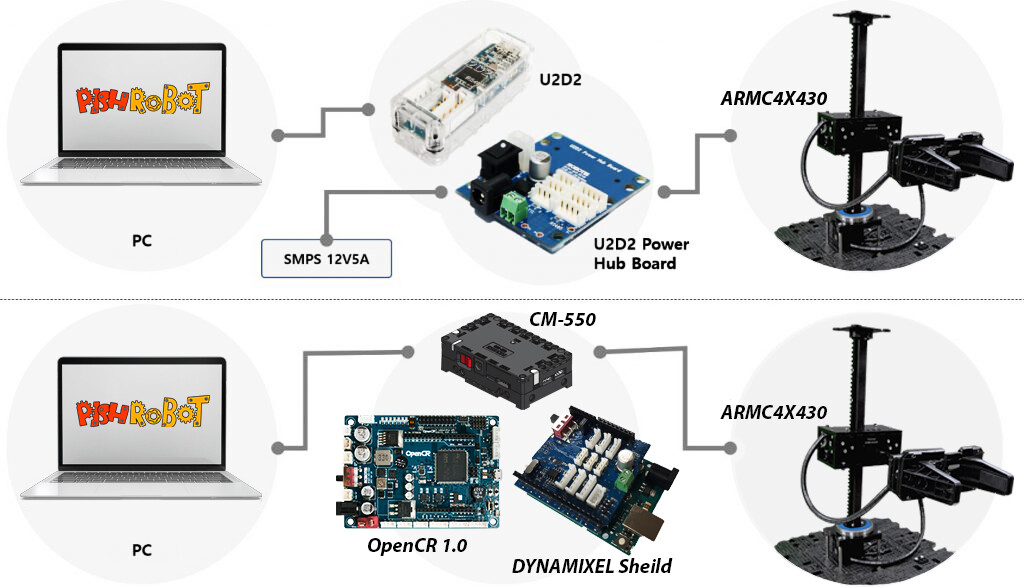
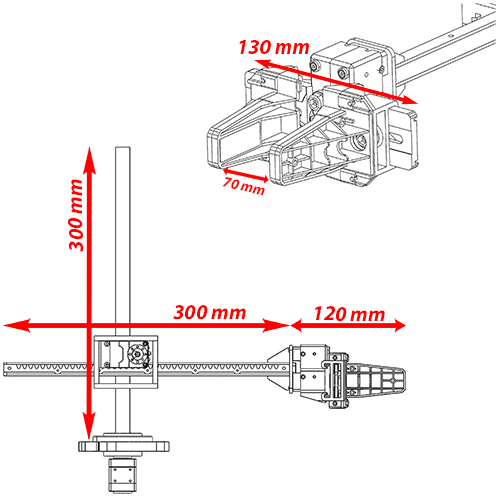
This type of configuration provides the robot with a cylindrical workspace. Compact design and independent control of each degree of freedom (DoF) are essential features of this robot.
The End Effector is 3D Printed version of ROBOTIS OpenManipulator-X gripper.
Feel free to ask if you have any questions! ![]()
Please share our project and this community to your friends! I’m very happy and excited to talk to robotics enthusiasts! ![]()
