사용환경은 18.04 입니다.
- roscore
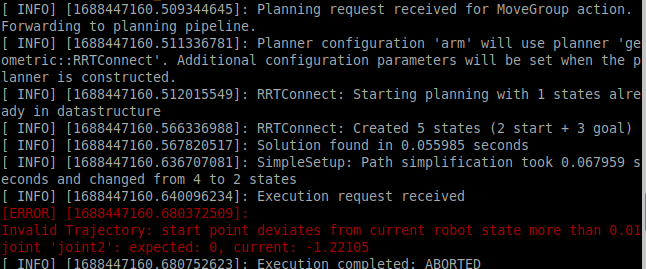
- roslaunch turtlebot3_home_service_challenge_tools turtlebot3_home_service_challenge_demo_remote.launch
- roslaunch turtlebot3_home_service_challenge_manager manager.launch를 실행하고 메세지를 통하여 매니퓰레이터의 동작을 확인하려고 했으나 Invalid Trajectory: start point deviates from current robot state more than 0.01 joint ‘joint2’: expected: 0, current: -1.22105 다음과 같은 오류가 발생합니다 이를 해결할 수 있는 방법이 있을까요?? (해당 오류는 1. roslaunch turtlebot3_home_service_challenge_tools turtlebot3_home_service_challenge_demo_remote.launch를 실행한 창에서 확인이 가능합니다. )