Issue: I want to use TB3 Waffle Pi + Openmanipulator+X with ROS 2 Humble, then I setup by following instructions in TurtleBot3
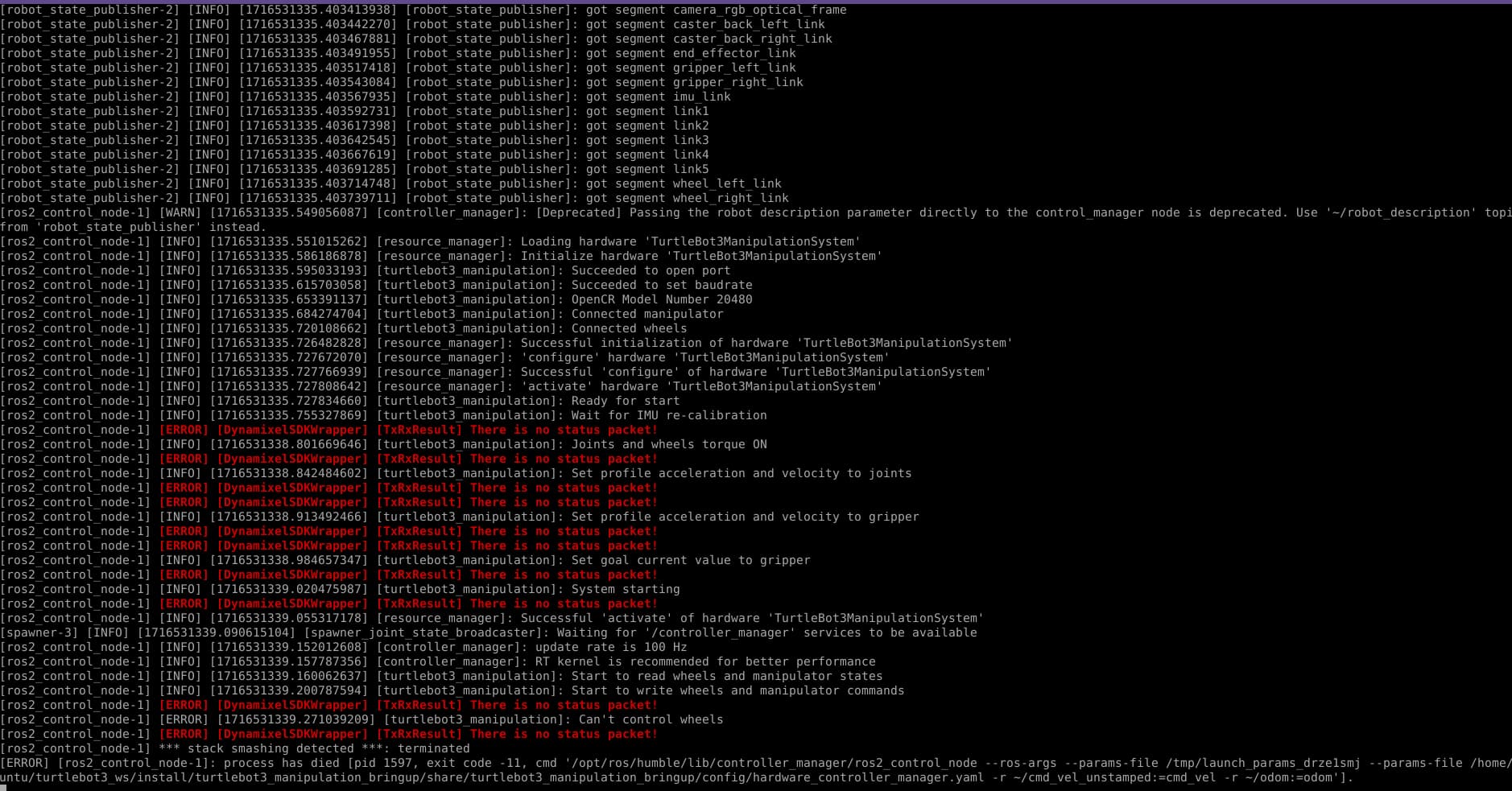
However, when I try to bring up with “ros2 launch turtlebot3_manipulation_bringup hardware.launch.py”, it shows error: “[ERROR] [DynamixelSDKWrapper] [TxRxResult] There is no status packet!”
“There is no status packet!” is a message that is displayed when a timeout occurs when receiving with the Dynamixel SDK. It is possible that the reception from Dynamixel is timing out.
Please write usb_to_dxl .ino to OpenCR, and try again after setting the “Return Delay Time” of each XM430 to 0 on Dynamixel Wizard 2.0.