We’re excited to introduce “OMY,” our open-source AI manipulator. This project focuses on Imitation Learning and offers several key functionalities as open source for your robotics research and development.
Here are the main open-source features you can dive into:
Teleoperation for Imitation Learning: Intuitively control and teach the robot using a leader device.
Self-Collision Avoidance: Prevents the robot from colliding with its own parts, ensuring safer operation.
Gravity Compensation: Counteracts the arm’s weight, reducing user fatigue and preventing sag.
Friction Compensation: Offsets motor friction for smoother and more precise movements.
Spring Effect: Adds stability by preventing certain joints from overextending.
Check out this video to see OMY’s basic operations and these features in action!
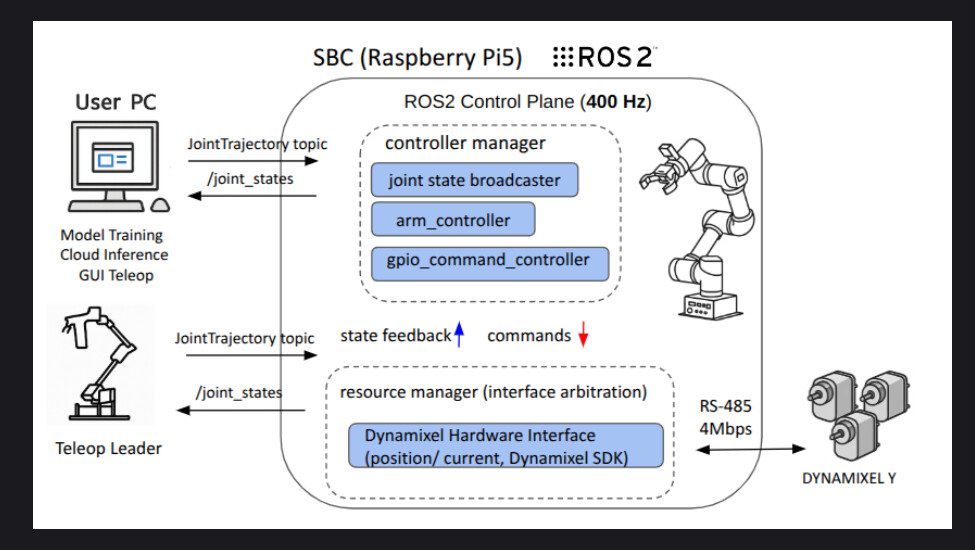
So it looks like that the “hardware controller” (SBC) for the OMY is an RPi5.
I have a few questions regarding the RPi5 that you may be able to help with:
I plan to use a 16 GB RAM version of the RPi5 + 128 GB SD card. Would this be sufficient? Or do I need to install a NVMe SSD also? Is there much reading and writing to the SD card or the SSD module when using the OMY manipulator at run time?
The RPi5 should be installed with Ubuntu 24.04 and ROS2 Jazzy, right? So far, it is not entirely clear to me about which software to install on the User PC and which software to install on the Hardware Controller (SBC). Exactly the same software tools?
Regarding the upcoming OMX, is it correct to assume that the OMX’s SBC is also an RPi5?
The OMY SBC comes with a custom real-time patched OS. All software runs inside Docker containers. The software stack on the SBC and the User PC is identical in terms of container images.
The open_manipulator container is pre-installed on the OMY SBC, and the open_manipulator_bringup process should be launched from the SBC.
For better performance, it’s recommended to run the rest of the applications from the User PC.
Regarding OMX, it is shipped without an SBC.
As for physical-ai-tools, this package is specifically for imitation learning and requires an NVIDIA GPU to run deep learning models. Therefore, it should be installed and used on the User PC, not on the OMY SBC.
Since the OMY uses a custom OS, installing ROS natively on the SBC is not straightforward. It’s better to use the preconfigured Docker containers. However, if you’re using a general-purpose OS on your own SBC, you can install ROS natively and build packages from source.
I see, so from the user’s point of view, the OMY-SBC is a turn-key system, so the user should not do “APT UPDATE/UPGRADE” to it and just wait on any update from ROBOTIS when it becomes available?
Also ideally the PC should have an NVIDIA GPU too then.
 Teleoperation for Imitation Learning: Intuitively control and teach the robot using a leader device.
Teleoperation for Imitation Learning: Intuitively control and teach the robot using a leader device. Self-Collision Avoidance: Prevents the robot from colliding with its own parts, ensuring safer operation.
Self-Collision Avoidance: Prevents the robot from colliding with its own parts, ensuring safer operation. Gravity Compensation: Counteracts the arm’s weight, reducing user fatigue and preventing sag.
Gravity Compensation: Counteracts the arm’s weight, reducing user fatigue and preventing sag. Friction Compensation: Offsets motor friction for smoother and more precise movements.
Friction Compensation: Offsets motor friction for smoother and more precise movements. Spring Effect: Adds stability by preventing certain joints from overextending.
Spring Effect: Adds stability by preventing certain joints from overextending.