I am trying to build a robot leg with two Dynamixel XL430 as hip motor and knee motor. Currently, the motions of two motors have been designed and calculated in matlab and generated as txt file. I was wondering if I can ask the motor to read the files and act?
There isn’t a way to get the DYNAMIXELs to read the motors directly, but you could certainly write a program to read them and have the motors complete the trajectories.
However, I think it would probably be simpler to use the official MATLAB SDK to control the servos.
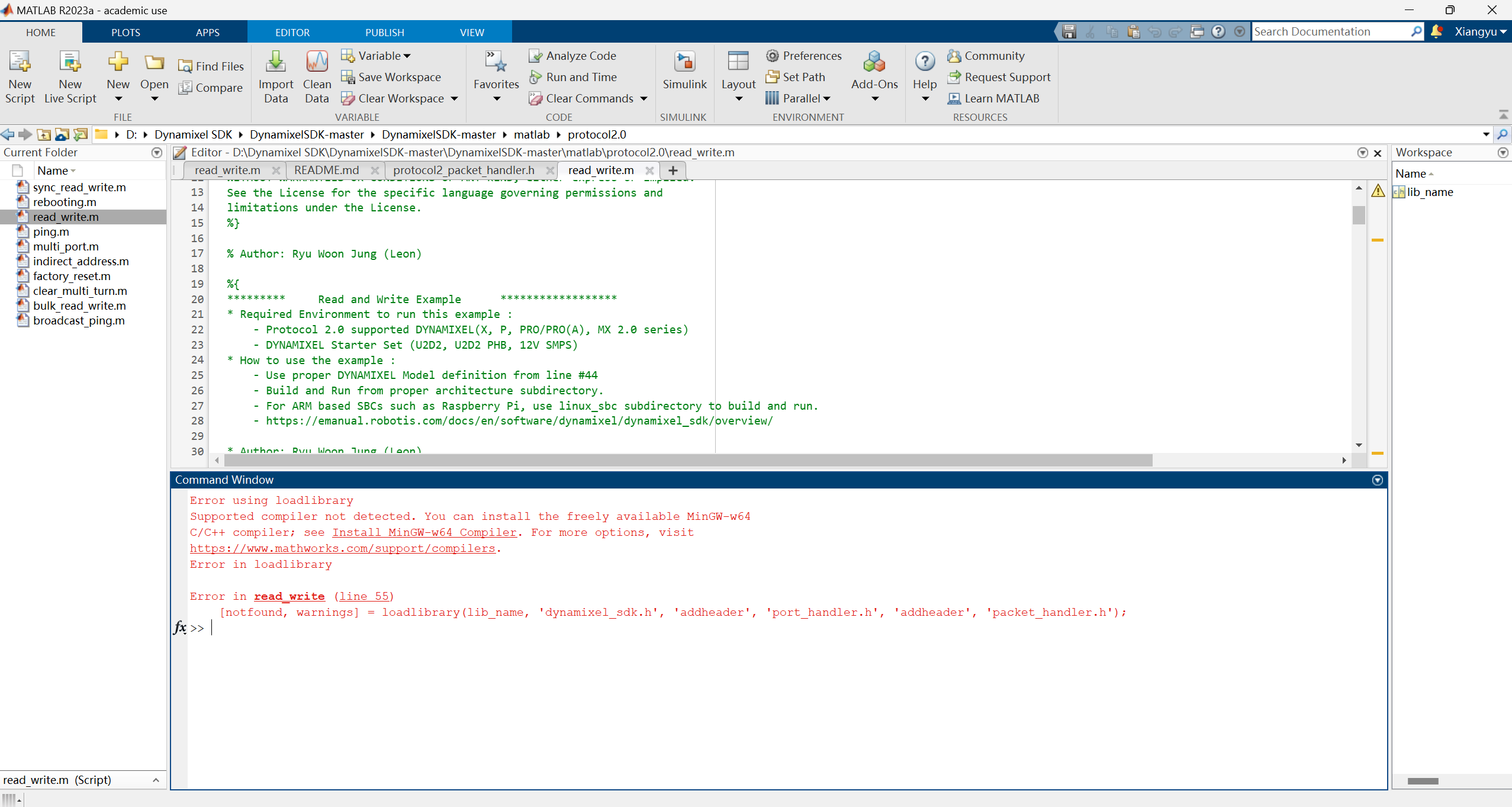
I have followed your suggestion to setup the Dynamixel SDK into Matlab. I have followed the instructions to set path for the Dynamixel SDK. However, I am facing the issue with matlab as the picture shown below. Could you please help me to solve this?
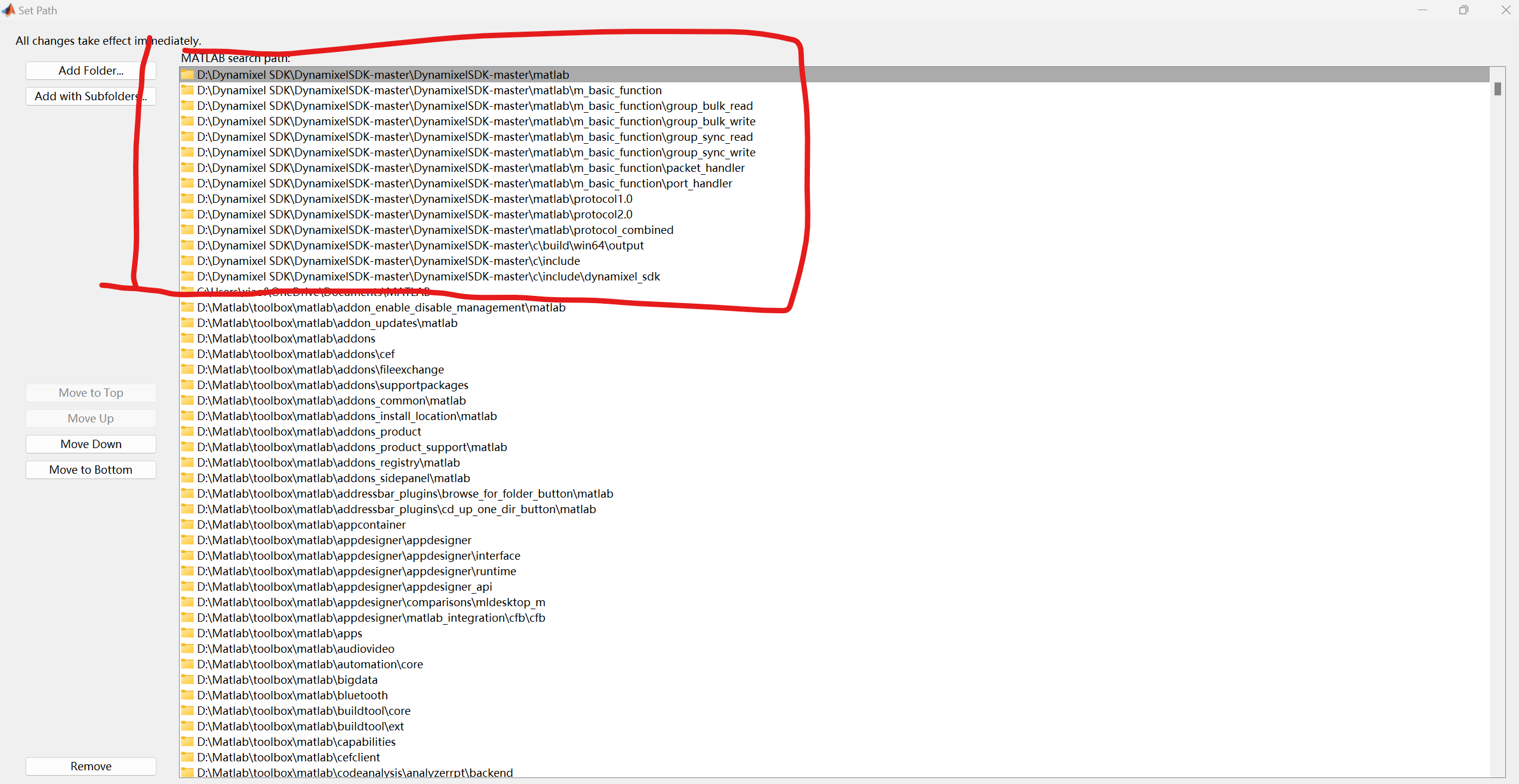
The path set shown below
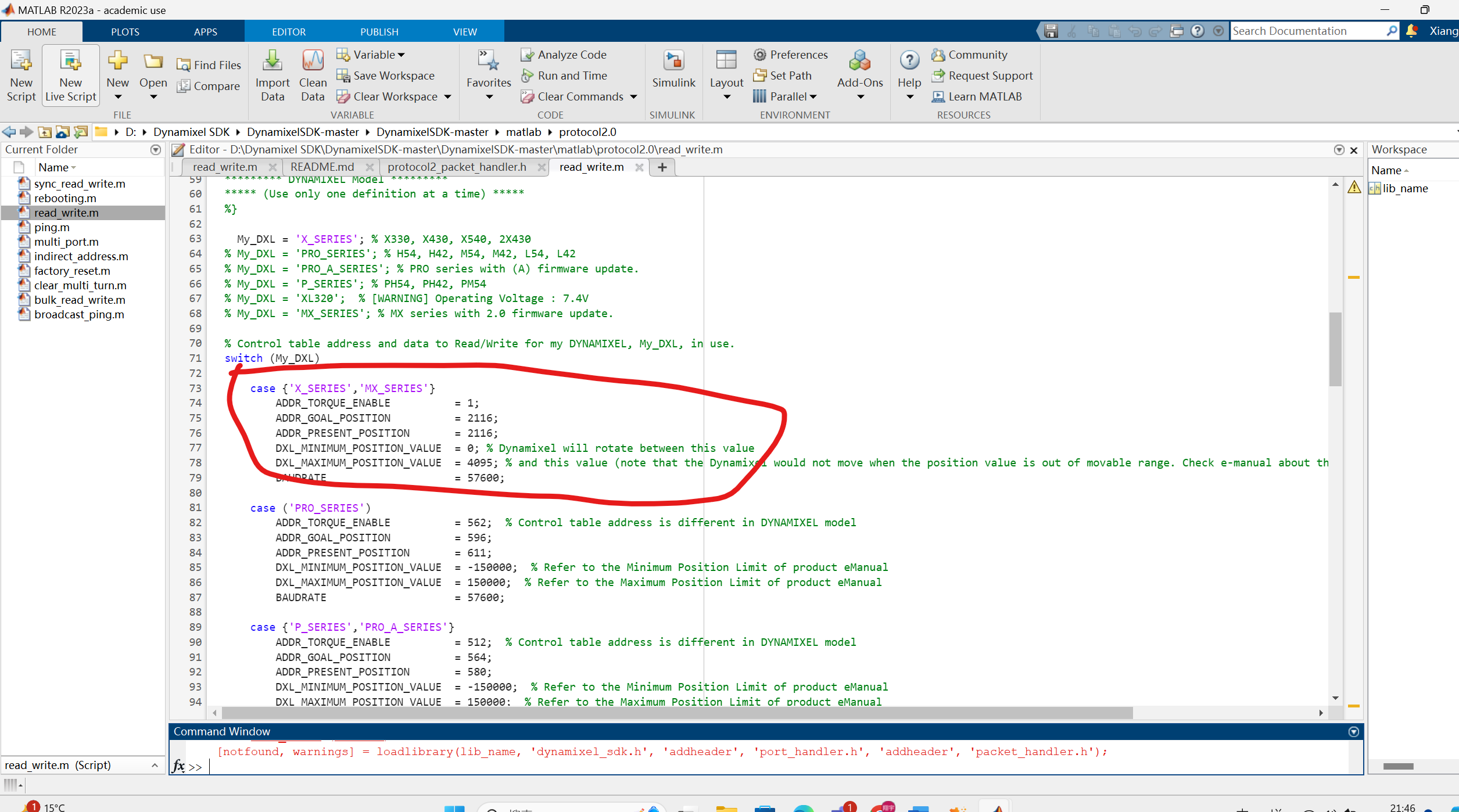
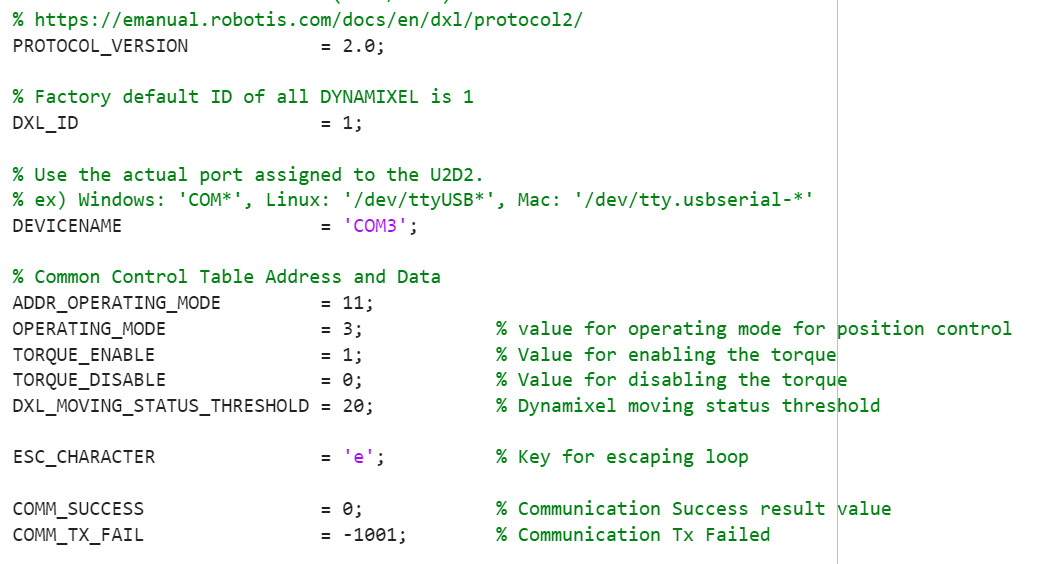
I am using XL430-W250 motor and Open RB150 to communicate. I am also not sure how to set the ADDR_GOAL_POSITION and ADDR_PRESENT_POSITION
I am currently facing another problem. I need to control four xl430 w250 as the hip and knee motors for both right and left side of the robot. I have connect them properly and use Dynamixel SDK in matlab. The motor can read the predefined trajectory .txt file. But the speed the quite slow and it not what I designed. I set the input voltage as 11.1 V. Could you please help me to check? I have attached the control code, the trajectory files and the connection picture. Left_theta_h dxl.txt (3.2 KB) Left_theta_k dxl.txt (3.2 KB)