After I installed ROS noetic, I just installed openmanipulater package like image that I attached. but when I type this cod "
roslaunch open_manipulator_controller open_manipulator_controller.launch
" my computer always say “RLException: [open_manipulator_controller.launch] is neither a launch file in package [open_manipulator_controller] nor is [open_manipulator_controller] a launch file name
The traceback for the exception was written to the log file”.
I only used U2D2, How can I solve this issue???
Rebuild the Workspace
Rebuild the Catkin workspace and source the environment:
cd ~/catkin_ws
catkin_make
source devel/setup.bash
After rebuilding, if you run roslaunch open_manipulator_controller open_manipulator_controller.launch again, can you share the error log or message you receive? This will help in diagnosing the issue more effectively.
도와주셔서 감사드립니다!! 제가 ros 초보자라서 많이 힘드네요… 드린 코드로 리빌딩하였고 사진과 같은 에러가 떴습니다. 어떻게 해야 할까요? ㅠㅠ
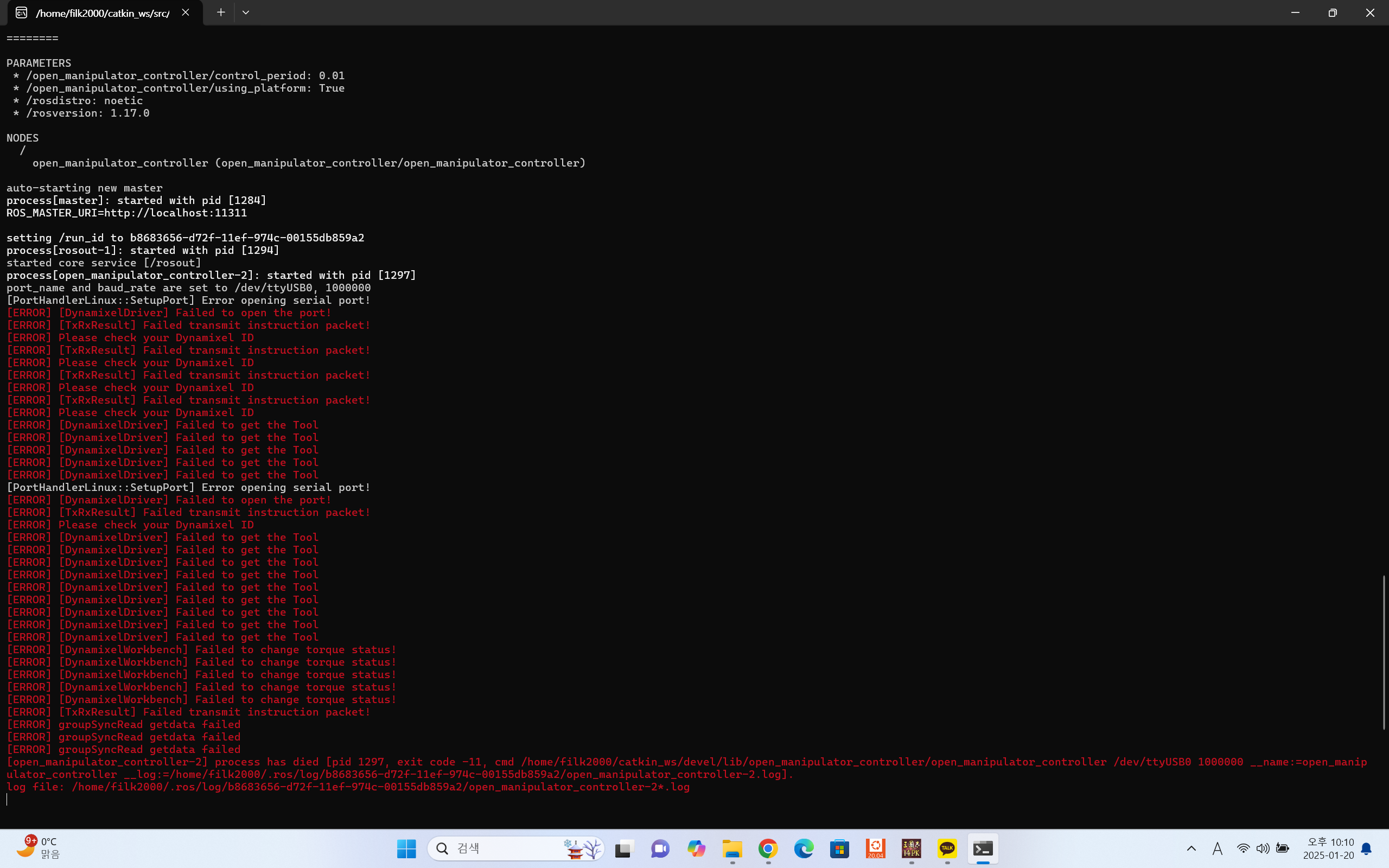
To use it with WSL, you need to configure USB recognition specifically. Follow this guide to ensure the U2D2 is recognized within WSL:
Connect USB devices in WSL
We recommend installing Ubuntu directly for better compatibility.
If you encounter any other issues, feel free to leave a comment!