Software
(What program are you using?)
Control Environment
(Describe your robot’s control environment. This includes the PC (operating system & version) or other controller as well as the power supply you are using.)
Remote PC - Ubuntu 18.04 ROS Melodic
Turtlebot3 Burger - Ubuntu 18.04 ROS Melodic Image downloaded from TurtleBot3
Software Description
(A detailed description of the program that you are attempting to write, and what is is intended to achieve. Be sure to specify any included libraries or other third party tools or resources used.)
Issue Description
(A detailed description of the issue you are experiencing, along with any error messages or other information you may have. The more information you share the more likely it is that somebody can help)
I’m trying to perform AMCL localization of a room on Turtlebot3 Burger.
On TB3, I ran
roslaunch turtlebot3_bringup turtlebot3_robot.launch
On the remote PC, I ran the below command to serve the map and AMCL launch.
roslaunch turtlebot3_navigation turtlebot3_navigation.launch map_file:=$HOME/catkin_ws/src/turtlebot3/turtlebot3_navigation/maps/myRoom.yaml
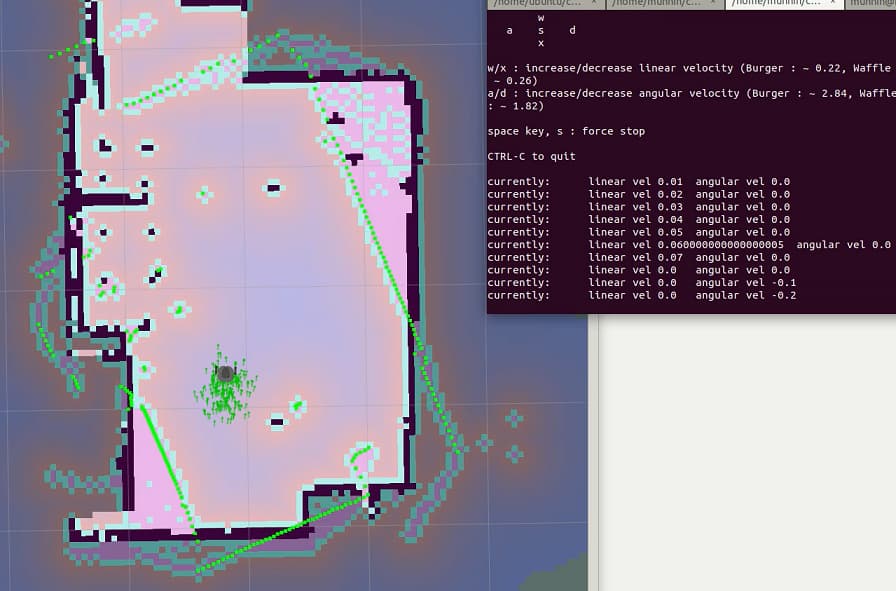
roslaunch turtlebot3_teleop turtlebot3_teleop_key.launch
rviz
I ran RVIZ and used teleop to align the laser scan to the map.
The laser scan will align to the map when I move the TB3 forward and backward. However, when I rotate clockwise or anticlockwise, the laser scan will rotate with the robot, instead of aligning with the wall of the map. Please advise what could the issue be. Thanks!
Additional Information/Attachments
(Photographs, debug logs, videos or other additional resources, If you don’t have any you may remove this section.)
See the video of the behavior.