hello. I am curious as to whether Manipulator-H, a currently discontinued model, can run on the ROS software of the currently sold open-type Manipulator-P. Are they compatible? What, if any, changes need to be made?
안녕하세요, 저는 지금은 단종된 모델인 manipulator-H가 현재 판매되고 있는 open manipulator-P의 ROS 소프트웨어에서 구동이 가능한지 궁금합니다. 호환히 가능할까요? 만약 변경이 필요한 부분이 있다면 어느부분의 변경이 필요한가요?
The OpenMANIPULATOR-P packages should work for your OpenMANIPULATOR-H.
The DYNAMIXEL P series was renamed and updated a while ago, and they are both the same arm, just before and after the name change and updates. Depending on how old your arm exactly is you may have to make some small changes to the control table registers in the library for compatibility reasons, but the kinematics and such are the same for both arms.
While the h model is being controlled with the P package, the spring cell continues to update as it moves and the home posture movement is excluded from the previous one. Need to restore firmware?
안녕하세요 h모델을 P패키지로 제어 중이었는데요, 다이나믹셀 패킷 오류가 가끔씩 떠서 펌웨어를 업데이트 했더니 home 포즈 움직임이 이전과 다릅니다. 펌웨어를 복구해야하나요?
hello. I am trying to run the manipulator-h model using the open manipulator p ROS package. I uploaded the firmware and an error keeps popping up. Which firmware version should I use? And if I restore the firmware, can I restore the firmware that matches the motor model name and then run the h model in the p package?
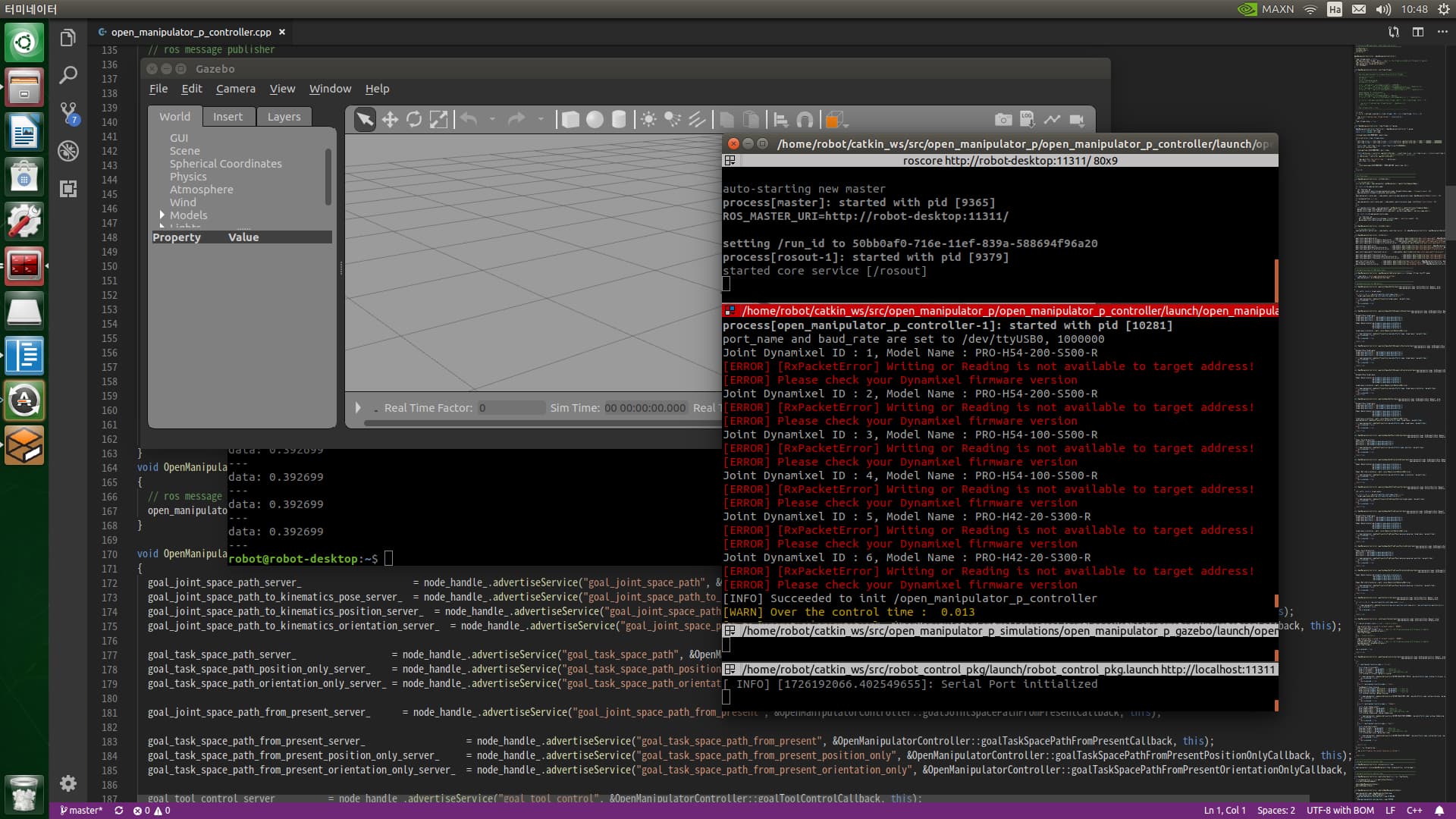
Would you be able to post screenshots of the error you are receiving?
Sometimes an error like the picture appears, and sometimes the message “groupSyncRead getdata failed” appears. And when I gave the home position command, joint3 was 45 degrees different, so I gave a homming offset. Is there anything else I need to change?