를 보시면 각 다이나믹셀들에 관한 설정들이 있습니다.
이중 <param name="Profile Velocity">200</param> 과 <param name="Profile Acceleration">50</param> 항목들을 둘다 0으로 바꿀 시 최대 속도로 움직이게 됩니다. 이 때 안정성이 낮아지는점 참고해주시길 바라겠습니다.
Hello,
Referring to the settings for each Dynamixel in the following link:
Please note that if you change both <param name="Profile Velocity">200</param> and <param name="Profile Acceleration">50</param> to 0, the robot will move at its maximum speed. Please be aware that this may reduce stability.
...
move_group_interface.setPoseTarget(target_pose);
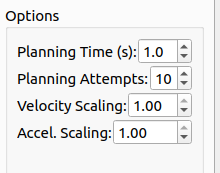
// 속도 & 가속도 스케일링 값을 최대로 설정
move_group_interface.setMaxVelocityScalingFactor(1.0);
move_group_interface.setMaxAccelerationScalingFactor(1.0);
move_group_interface.setGoalPositionTolerance(0.02);
move_group_interface.setGoalOrientationTolerance(0.02);
최종적으로 구동하고자 하는 속도는 아래 영상에서 우측 하단에 보이는 OpenManipulator-X의 정도의 속도로 구동하고자 합니다.