Good that you now have the OpenRB-150 which offers more flexible uses.
Let’s try to use the OpenRB-150 as a mini U2D2 that can only go to 1 Mbps max for baud rate. But that is good enough to take care of troubleshooting your AX-12A.
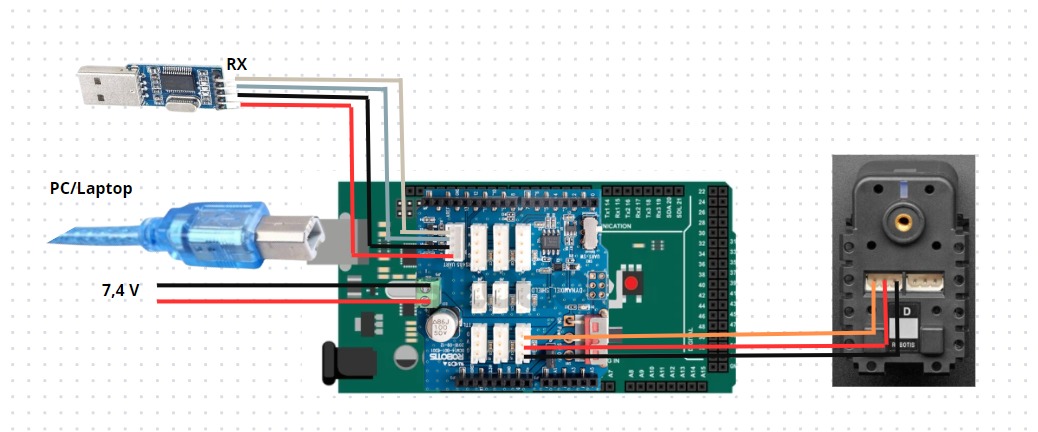
My physical setup is shown below:
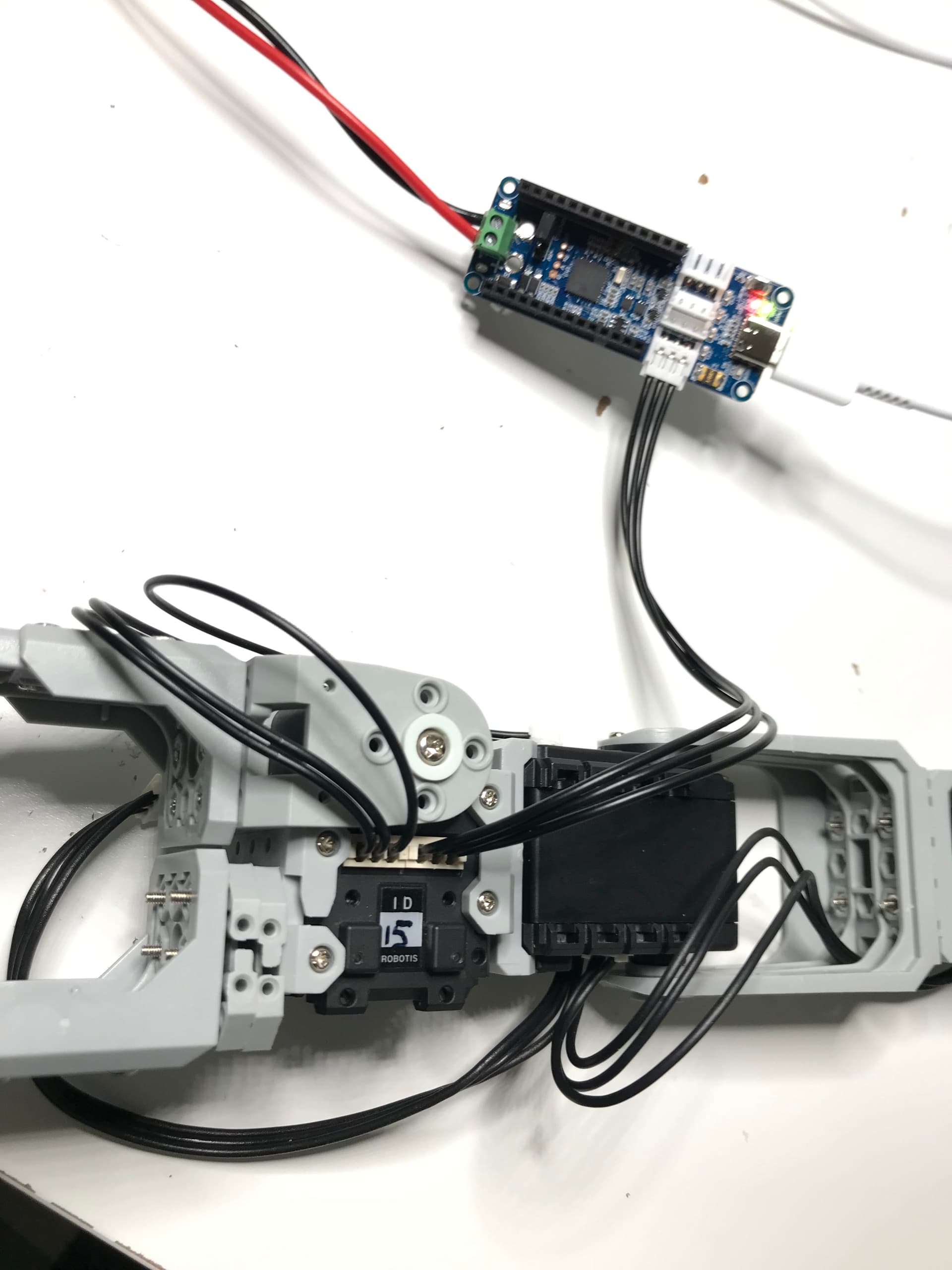
I supplied 12 V to the Terminal Block and the 150’s jumper is set VIN(DXL). My AX-12A happened to be ID=15. My PC sees the 150 as COM11.
I can see that you are using Arduino IDE 2.21. Can you see the “OpenRB-150” example named “usb_to_dynamixel.ino”? If you don’t see it, you may have to read up on this post at the Arduino Forum (Examples missing 2.2.1 - #7 by ptillisch - GIGA R1 - Arduino Forum) or switch back to Arduino IDE 1.8.19. See picture of this sketch below:
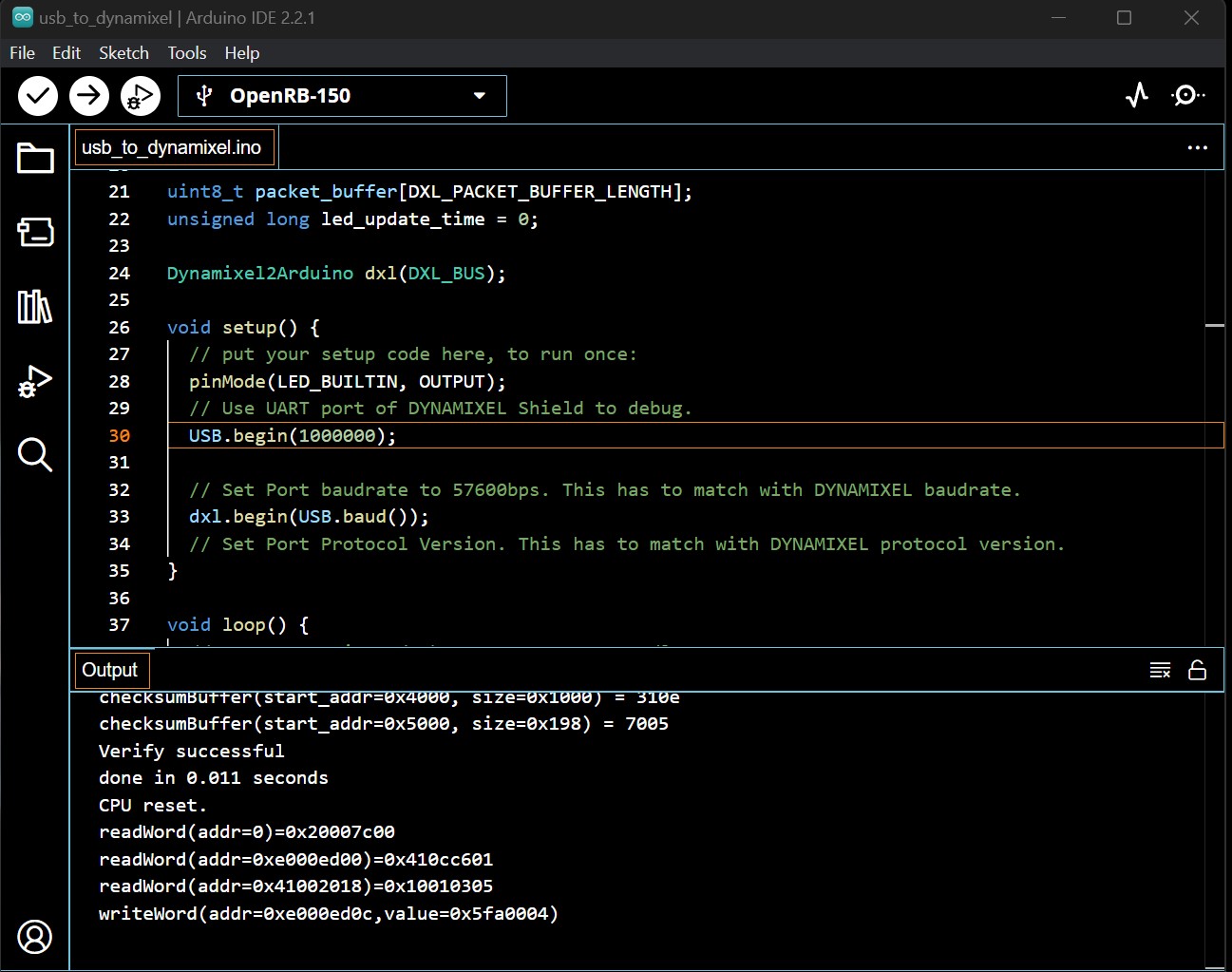
Anyhow, go to Line 30 and change the default argument from 57600 to 1000000 to match with the 1 Mbps baud rate on your AX-12A. You should be able to compile and download this sketch to your OpenRB-150 fine.
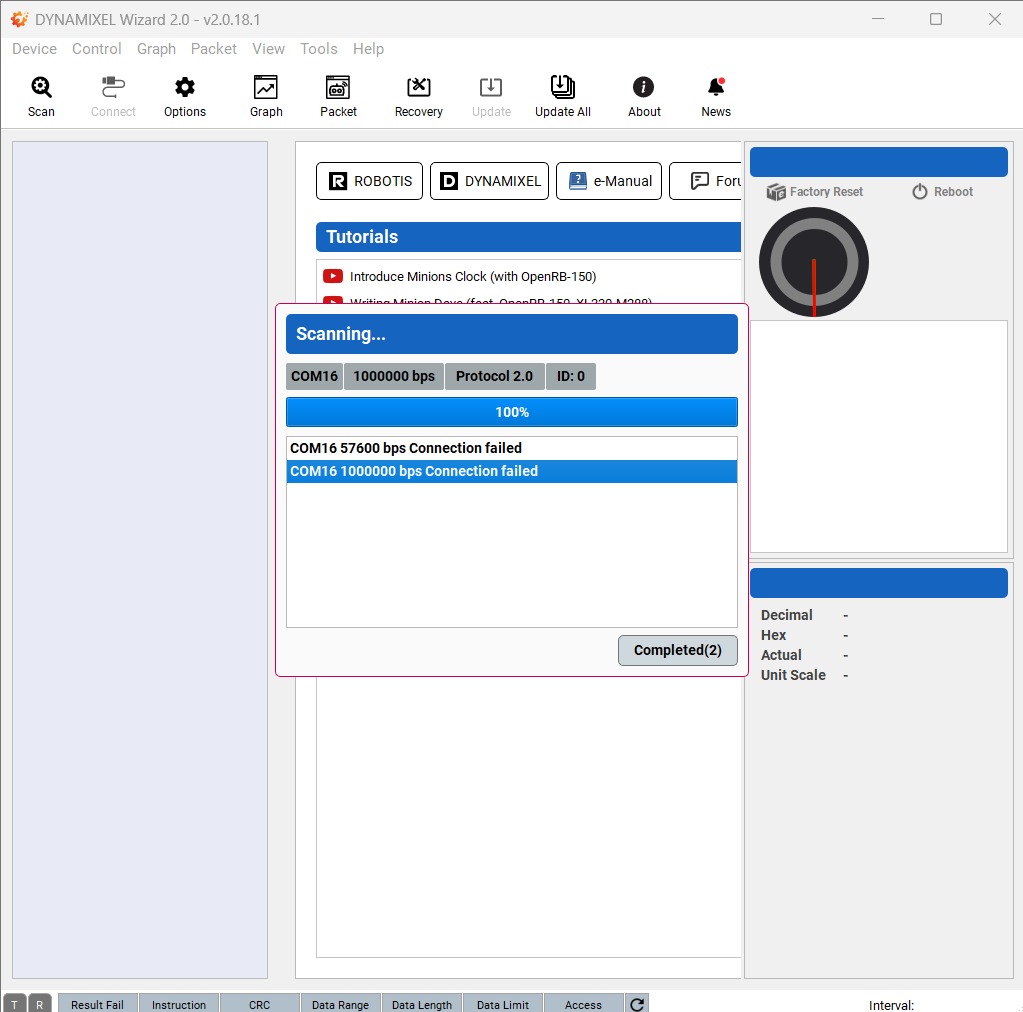
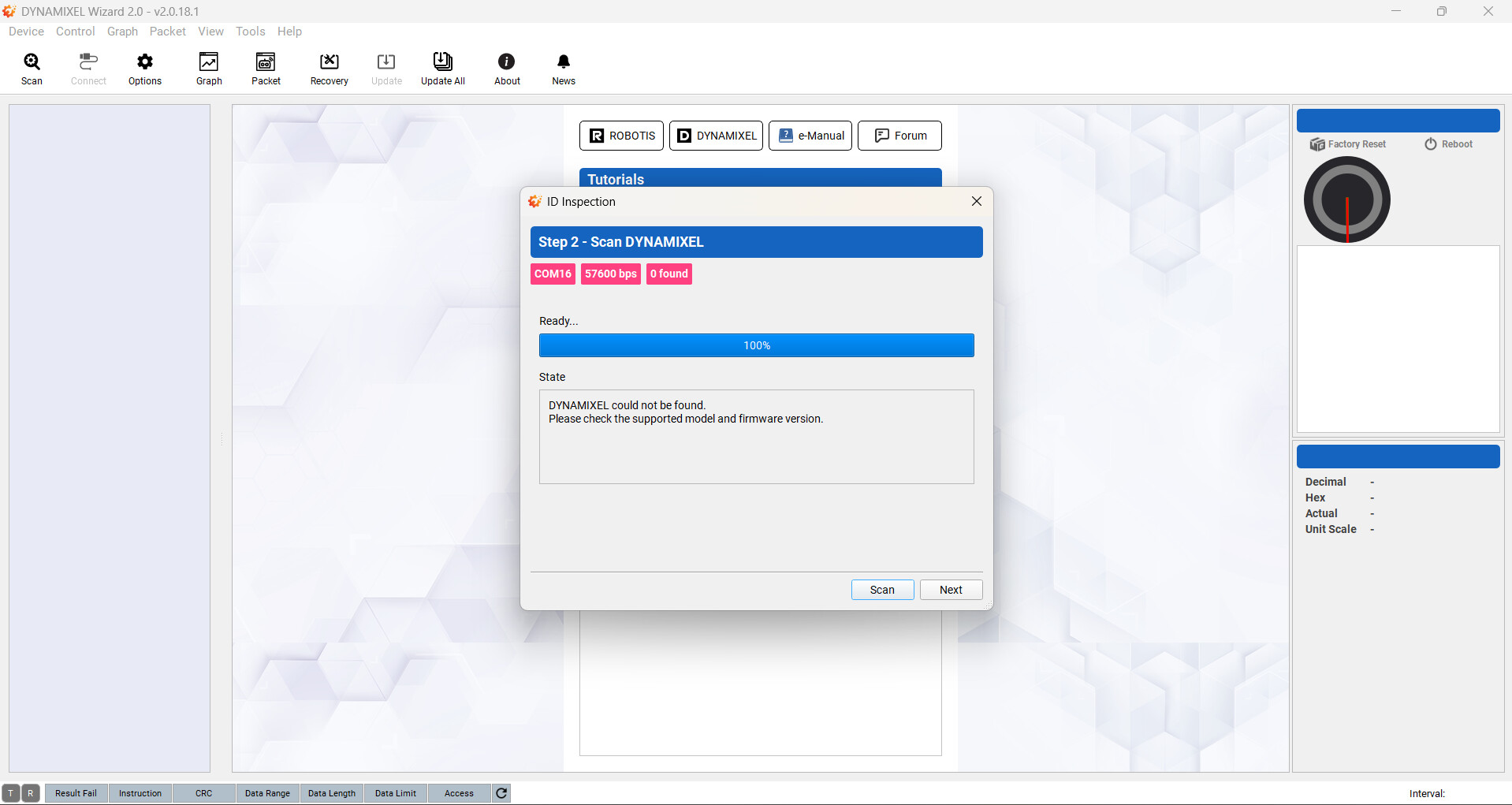
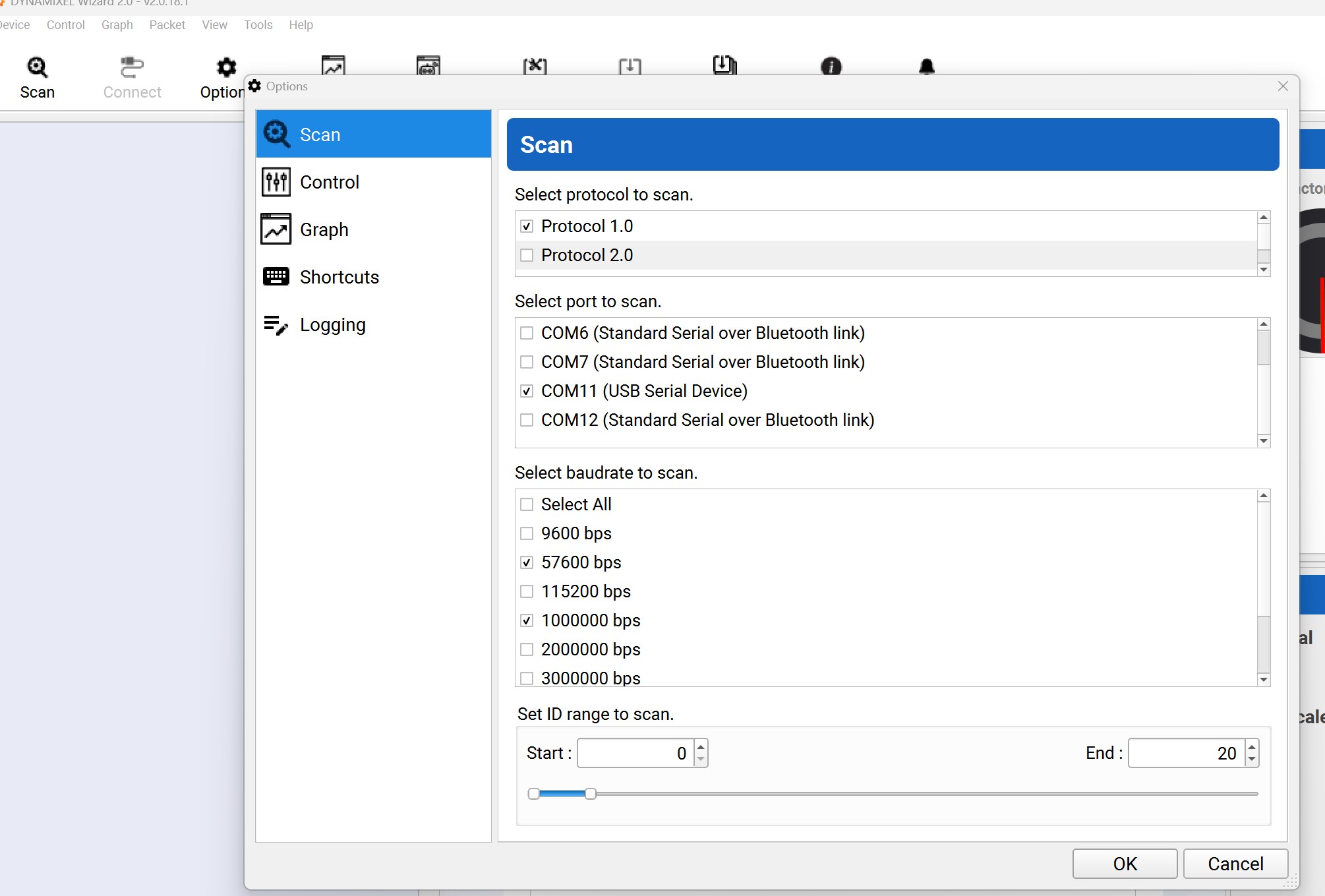
Once that done, start Dynamixel Wizard 2 on your PC and go to Options >> Scan and update the appropriate settings for Protocol 1, COM Port, Baud Rates and Range of the DXl IDs.
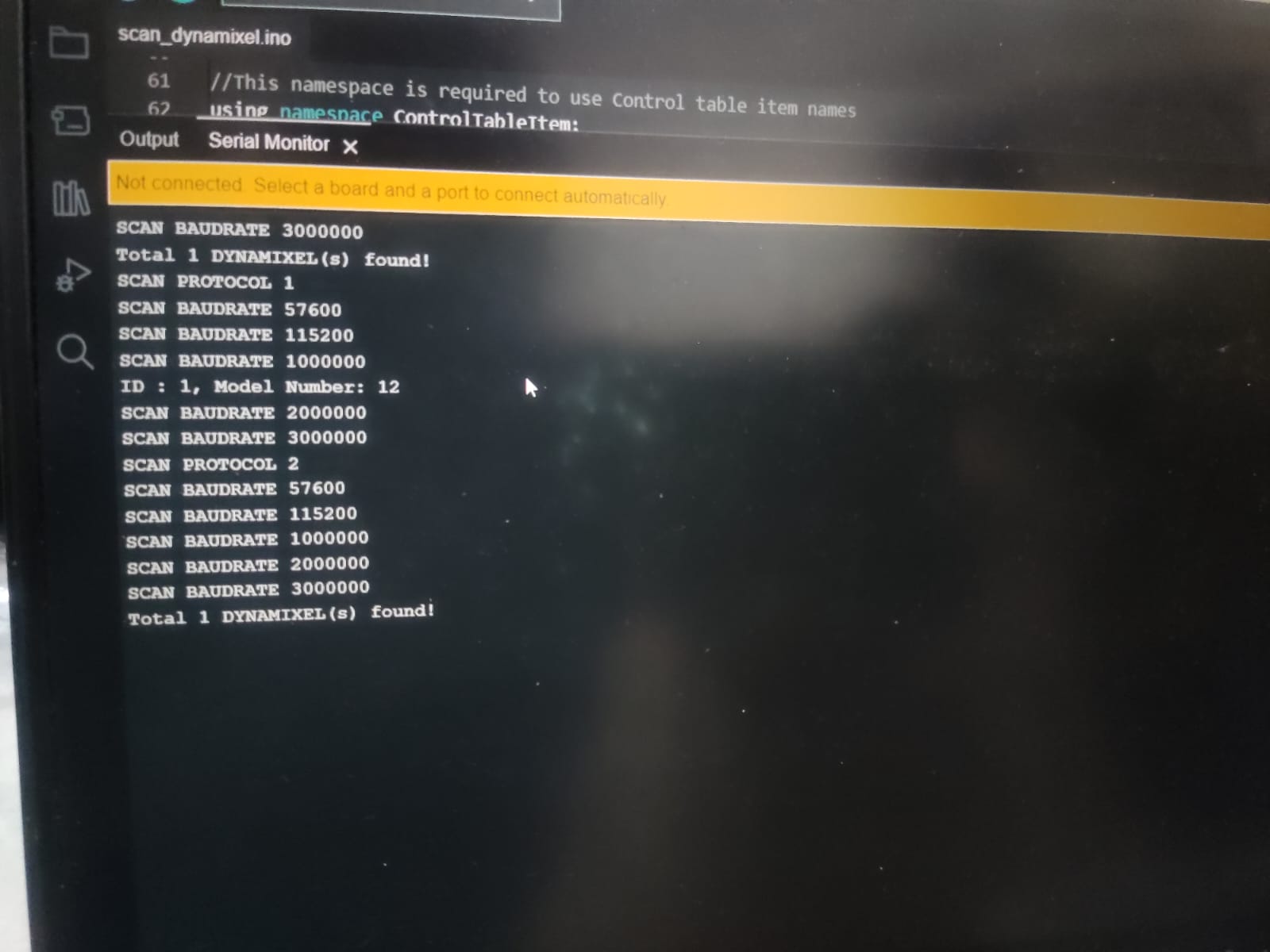
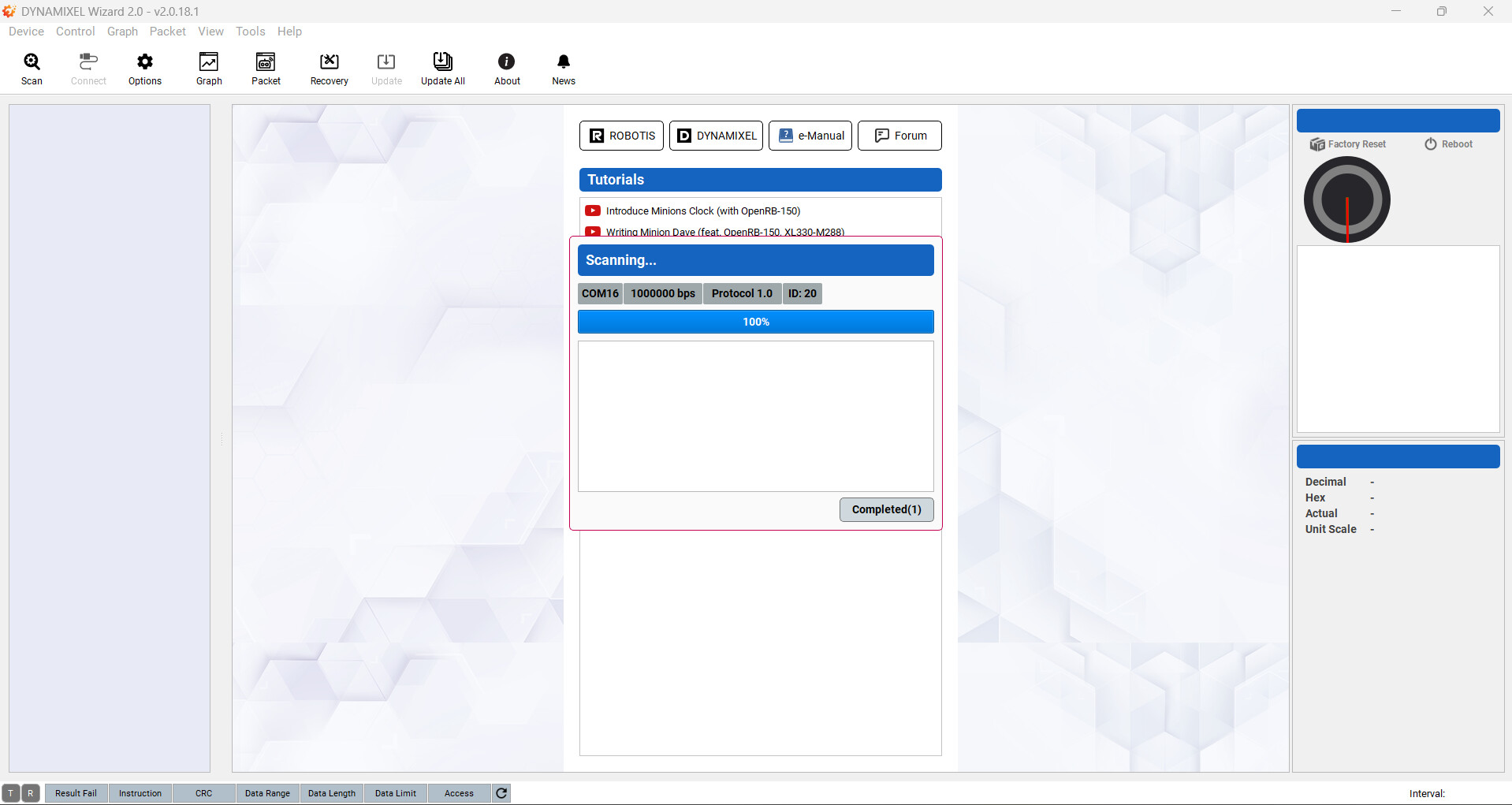
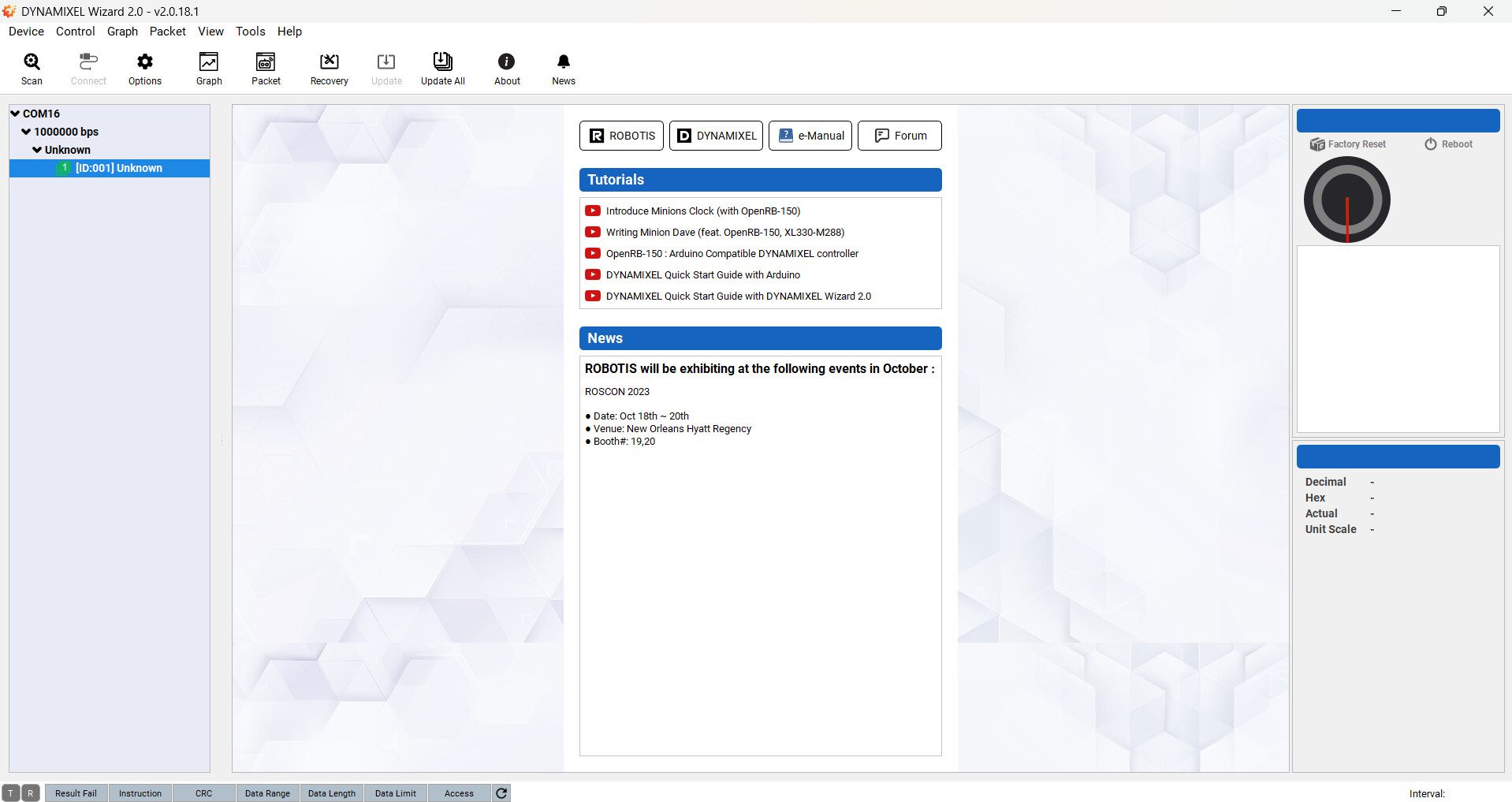
Then you can go back out to the Main Menu and choose Scan and you should be able to connect to your AX-12A (like mine as shown below).
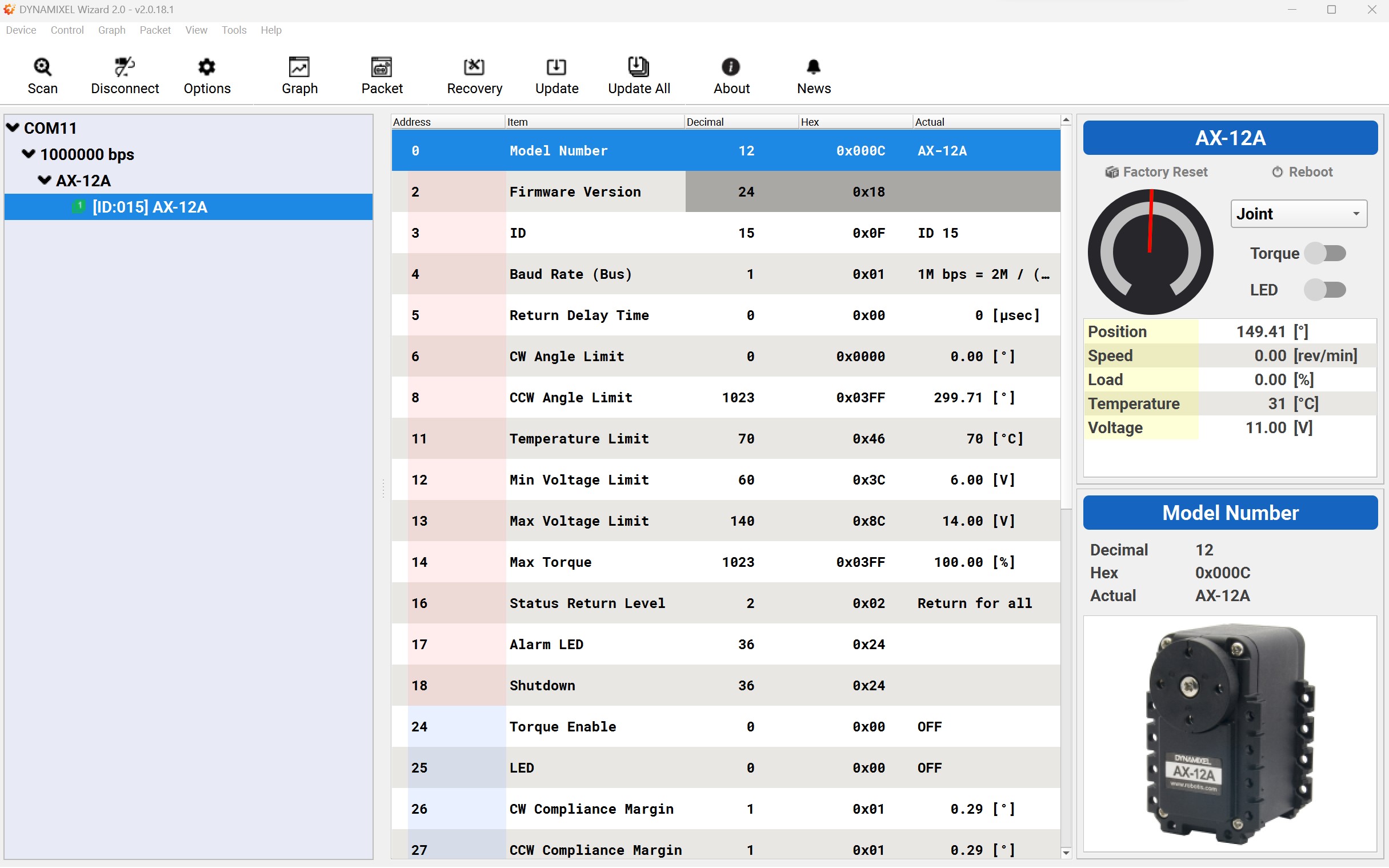
Then you can try different parameters to see if the AX-12A is fully operational. Once you confirm this result, we can then go on to the proper usage of the Dynamixel2Arduino Library.
Also, now that you have the OpenRB-150, you can read the free Kindle Sample of my Arduino book at this link:
https://www.amazon.com/Using-ARDUINO-ROBOTIS-Systems-Ngoc-ebook/dp/B0BPXGQ6YX/
My book uses the Dynamixel2Arduino library directly (not Dynamixel Shield), and there are lots of reference materials in the free sample for the XL-320 and XL-330 used with the OpenRB-150, but unfortunately, the materials on AX-12A with the Mobile Manipulator is not included in the free Kindle sample.