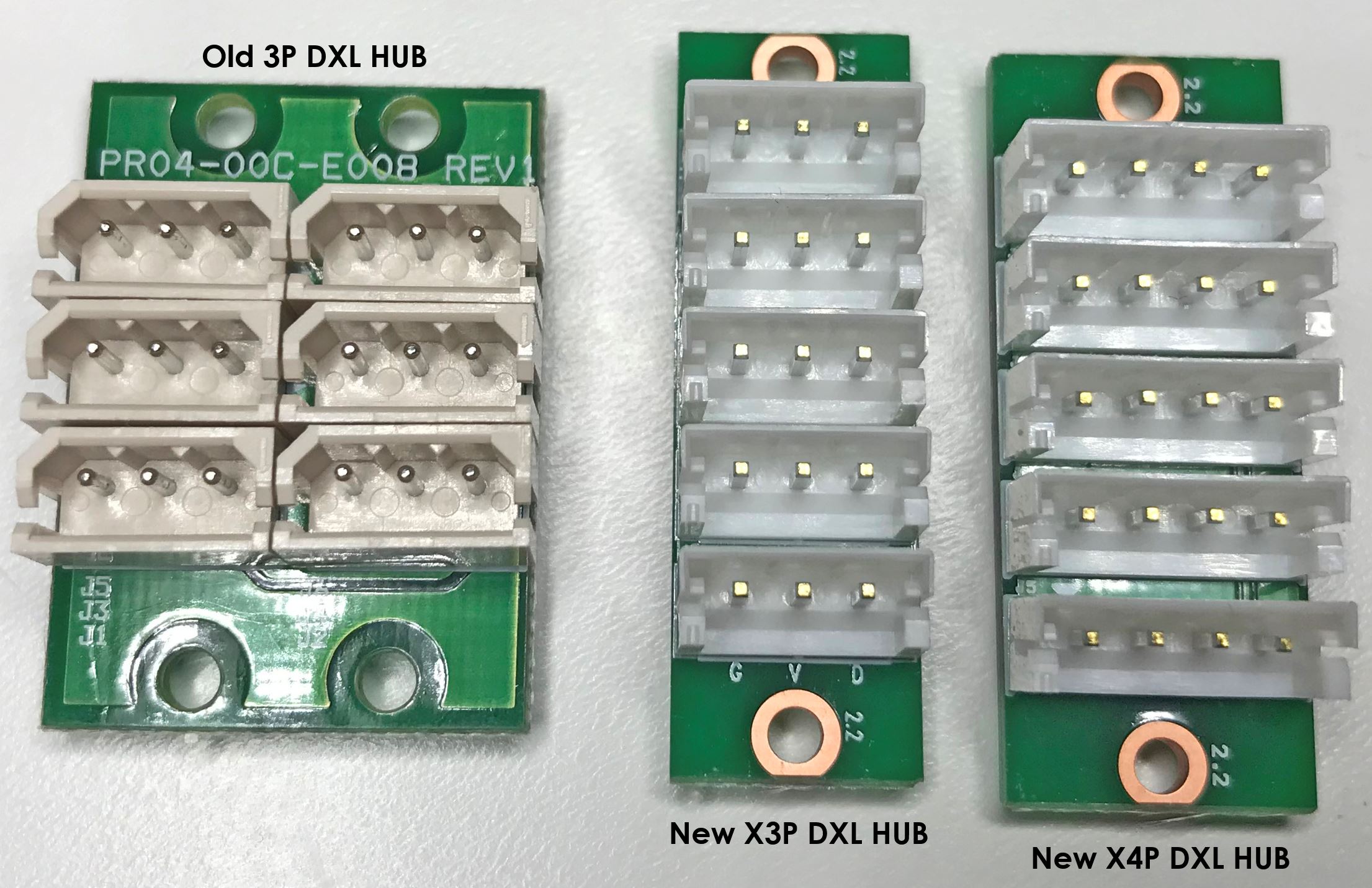
Just got some demo samples for new X-series Dynamixel Hubs. Don’t know when we can order them on the e-shop web site though, considering the current world wide shortage of “everything”!
These hubs can be handy for expansion into larger robots or if ones want to implement Independent Dynamixel Networks, or mixing DXLs that operate at different voltages.
I am thinking about replacing my CM-550 with the new RPi zero 2 W. These little board would make for a great breakout of UART pin and battery pins.
@Out_of_the_BOTS
You meant that you managed to get one RPi Zero 2 W? I still have to wait for mine, probably until early 2022.
It will be interesting to see if you can fit an IDE + DXL-SDK onto the 512 MB RAM for the 2W. I usually like to run my RPi in Desktop mode and via VLC server (which put extra loads on the 2W), so I’ll probably have to change my way of doing things with the 2W.
No I don’t have a RPi zero 2 w yet but am waiting for 1.
There shouldn’t be a problem of fitting the python DXL-SDK in to RAM as it is simply some code to send packets of data out the UART. I do way more complex things than that on micro controllers that usually have less than 1MB RAM. For example the CM-550 that I am thinking of replacing with the RPi zero 2 W only has 1MB RAM.
I would run the IDE on my computer then drop the python script to the RPi via WINSCP or filezilla, you can then either run the script via VLC in desktop mode or if you want to save RAM run it a PyTTY terminal. This is how the CM-550 works with the IDE on your PC then just the python script being down loaded on the CM-550.
The CM-550 that I am looking at replacing doesn’t have a desktop mode, it doesn’t have a terminal mode either like other ports of micropython. On the CM-550 I can’t access the file system and many parts of python has been removed. The RPi zero 2 W over comes many of the limitations I am encountering with the CM-550. The RPi zero 2 W just needs some extra circuits like breaking out some DXL connectors with a UART pin and battery volages and a buck converter to convert battery voltage down to 5v to run the RPi.