@slider
Are you using the standard configuration of PC + RPi3/4 for your TB3? Perhaps instead of looking at fixing this issue, would you be interested in another approach? Recently ROBOTIS releases a new TB3 branch (for beta testers) that uses DOCKER + ROS2 that combines the PC and SBC functionalities into a single computing platform. So far I tested this branch on a Burger and with a Jetson Orin Nano and also on an RPi5 (by itself). I have tested only “teleop” via the keyboard, but all components seemed to be working OK. If you are interested, a detailed post is available here:
I do not have an RPi3 or RPi4 anymore so I don’t know if DOCKER + ROS2 would work on them.
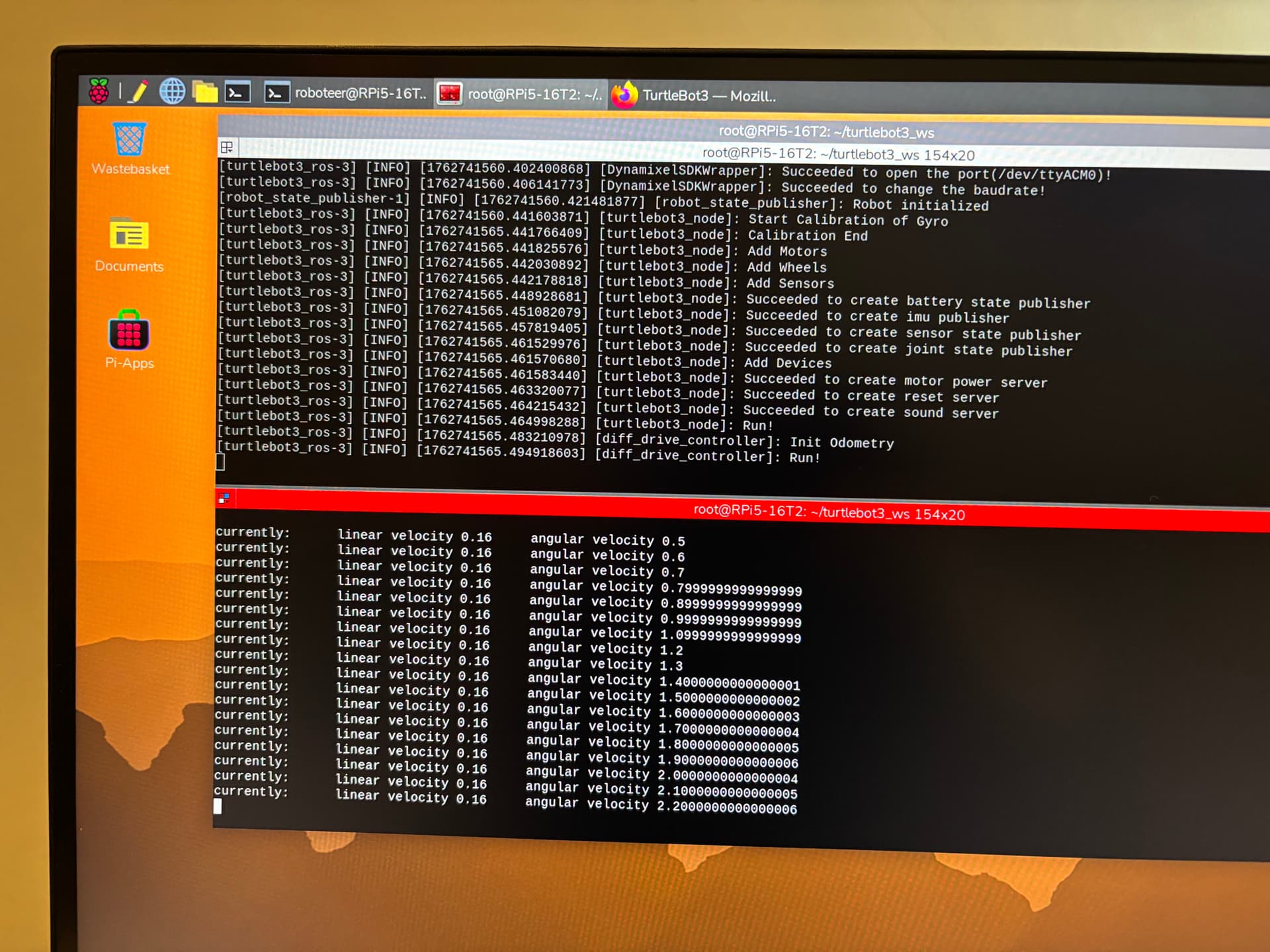
To be exact, my test set up merged PC+SBC into a single RPi5 16 GB running on Trixie OS (see enclosed picture). And then I installed that new TB3 branch using DOCKER and ROS2 JAZZY. So my TB3 is completely run within a DOCKER container.
So I meant that this DOCKER TB3 set up was using much simpler communication connections (all serial comm. are within the same RPi5) than the current TB3 JAZZY setup shown on the ROBOTIS e-manual. Does your high end PC act as the PC component for your TB3 system? Or does the NucBox act as the PC component for your TB3 system? Your RPi4 has the OpenCR right? Is the RPi4 on Ubuntu 24.04 LTS Server? And you used Ethernet or WiFi to wrap around all 3 components of your robot? I only used Ethernet to test mine so far.
Recently ROBOTIS started a DISCORD site where you can report turtlebot3 issues also and it seemed that you would get quicker and direct responses from the ROBOTIS software engineers. Have you joined that DISCORD site yet?