UPDATE 11/4/2025
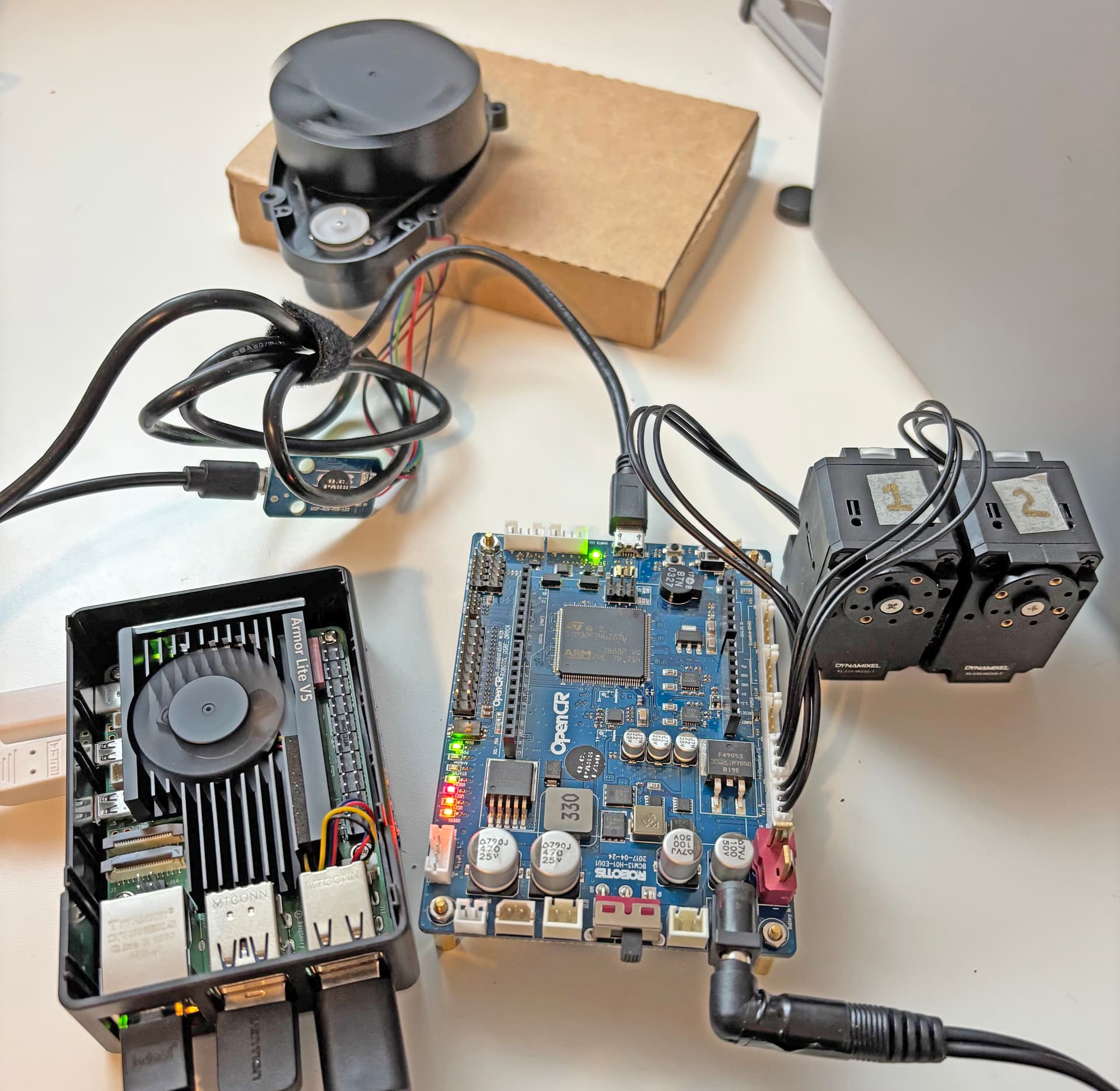
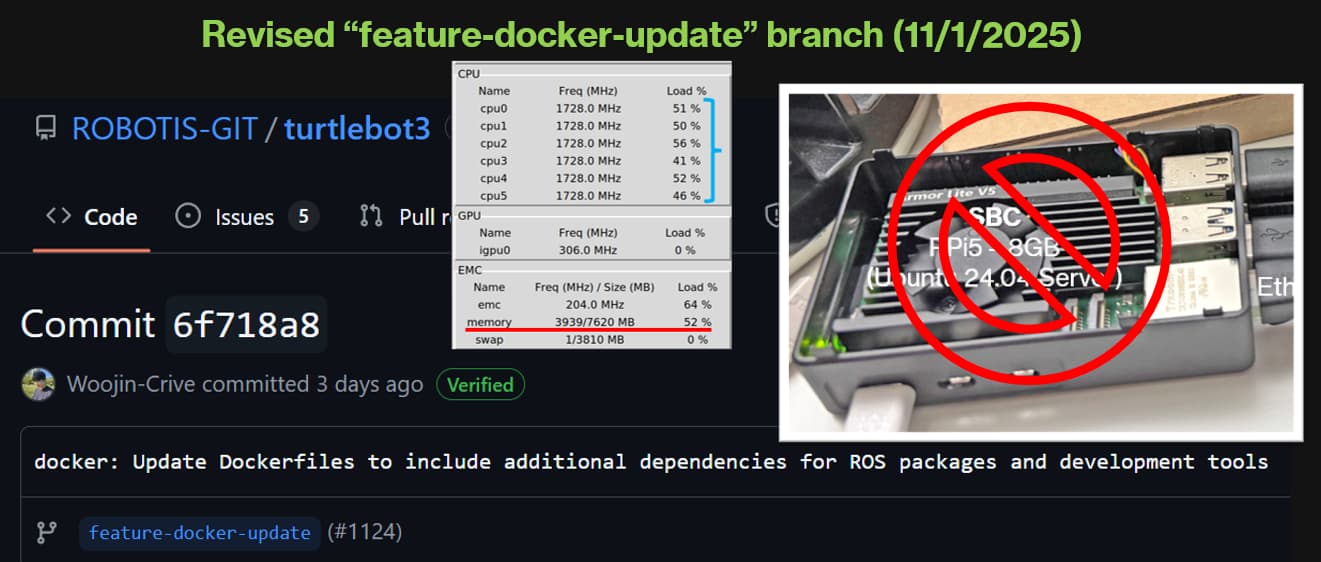
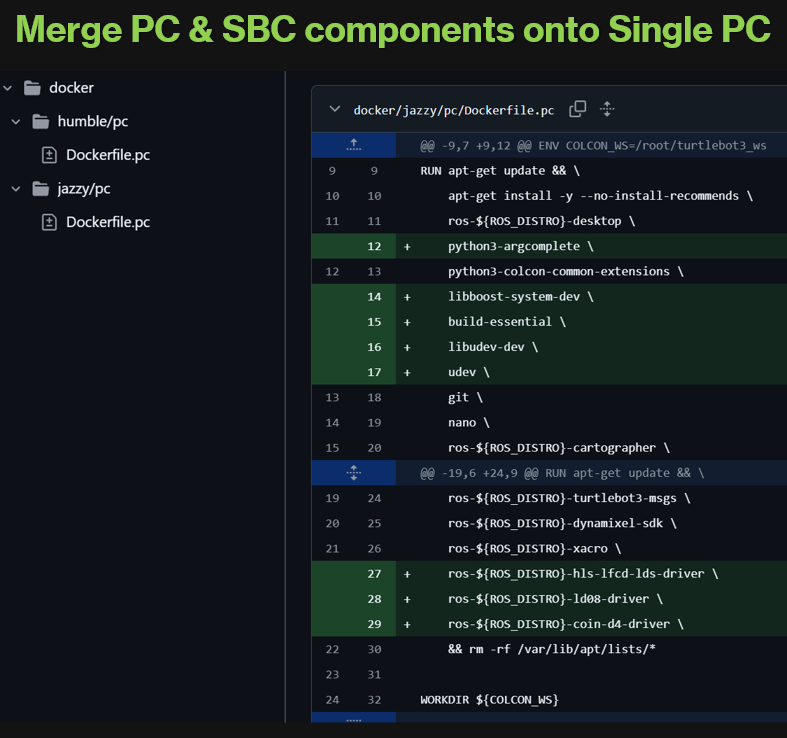
From the previous post, I could see that the JON still had quite a bit of spare computing resources, thus I wanted to “go further” and to get rid of the Co-Controller RPi5 altogether. Conceptually, this means that “PC” and “SBC” capabilities should be combined into a single file. I tried to combine PC+SBC Docker files but could not get them to work cleanly (blogs in DISCORD). But @Woojin-Crive got back from ROSCON 2025 and helped with a new version of the feature-docker-update branch see pictures below.
So I pulled out my second JON and prepared it for this “combined PC” version of TB3
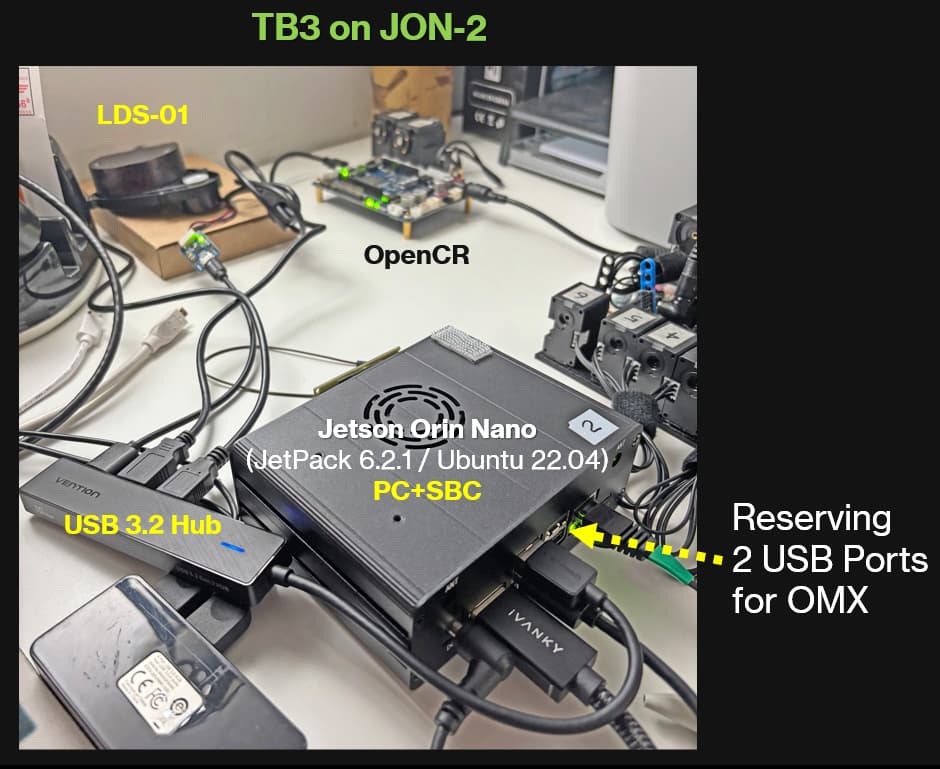
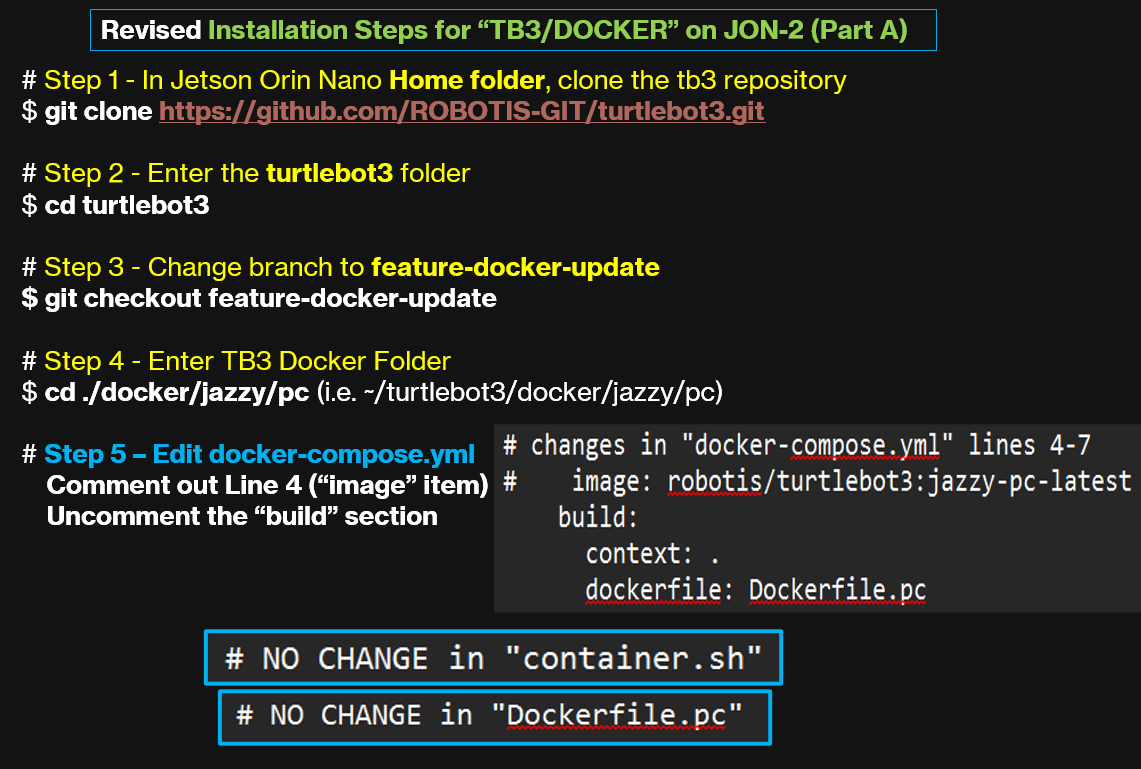
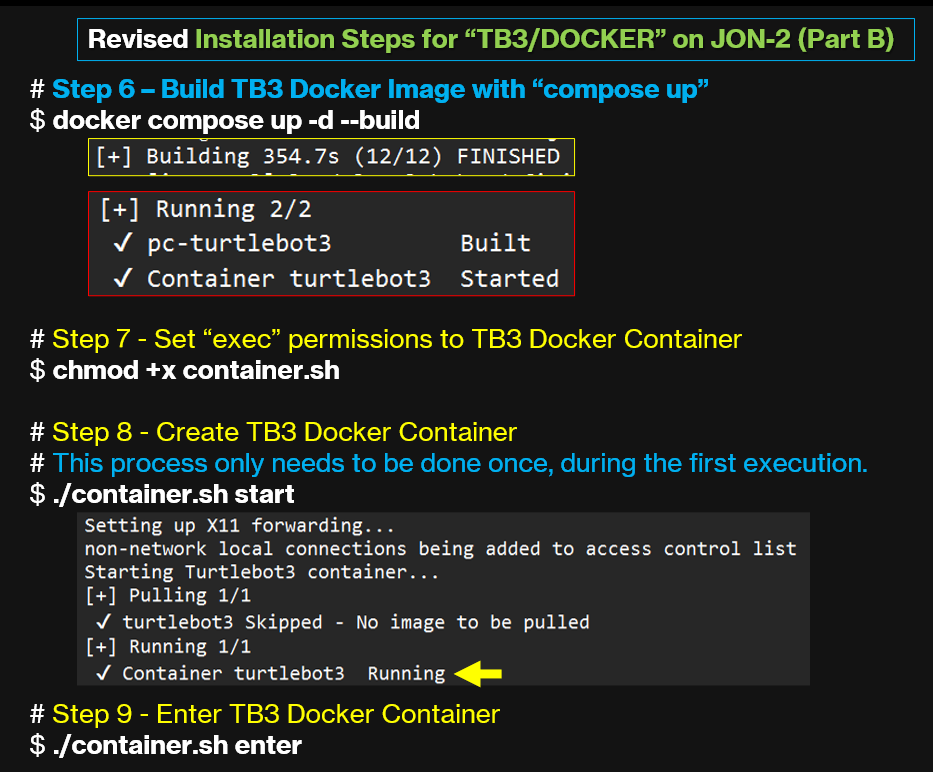
The next 2 pictures show the revised installation steps for TB3 on JON-2
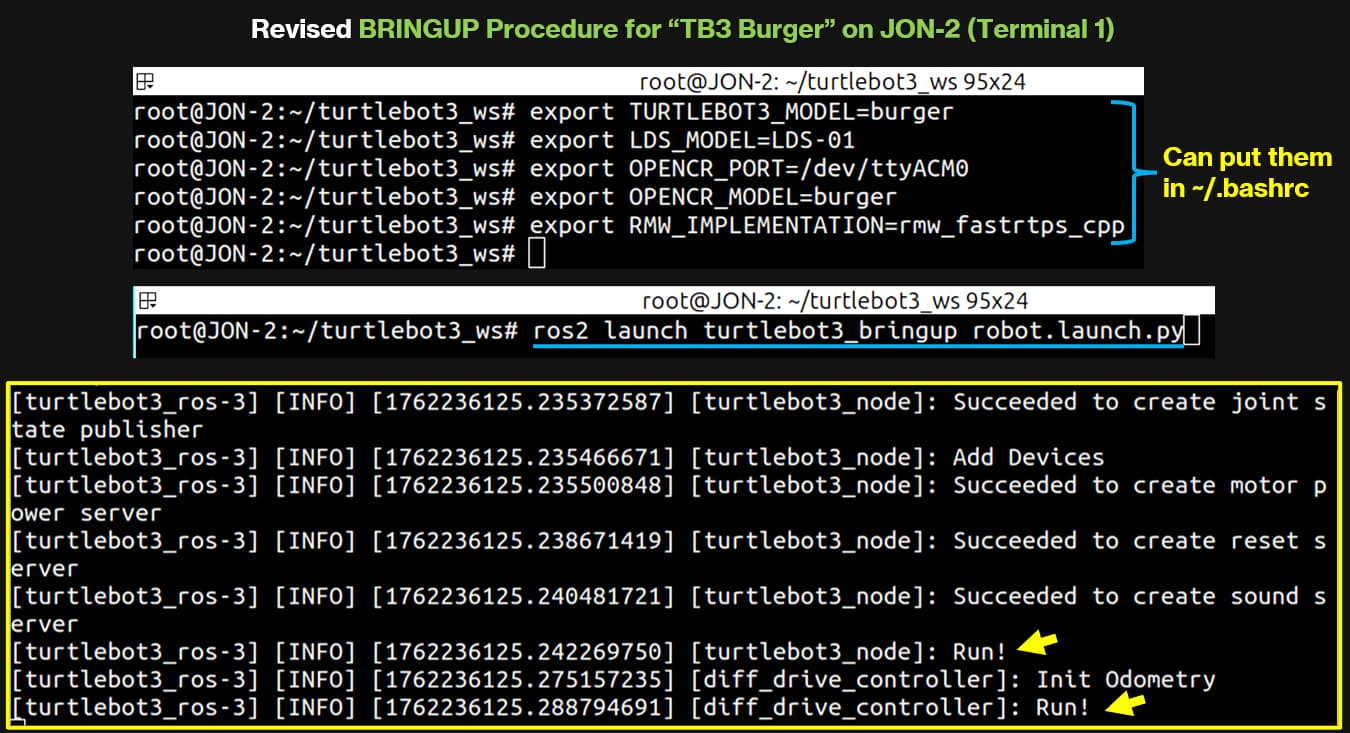
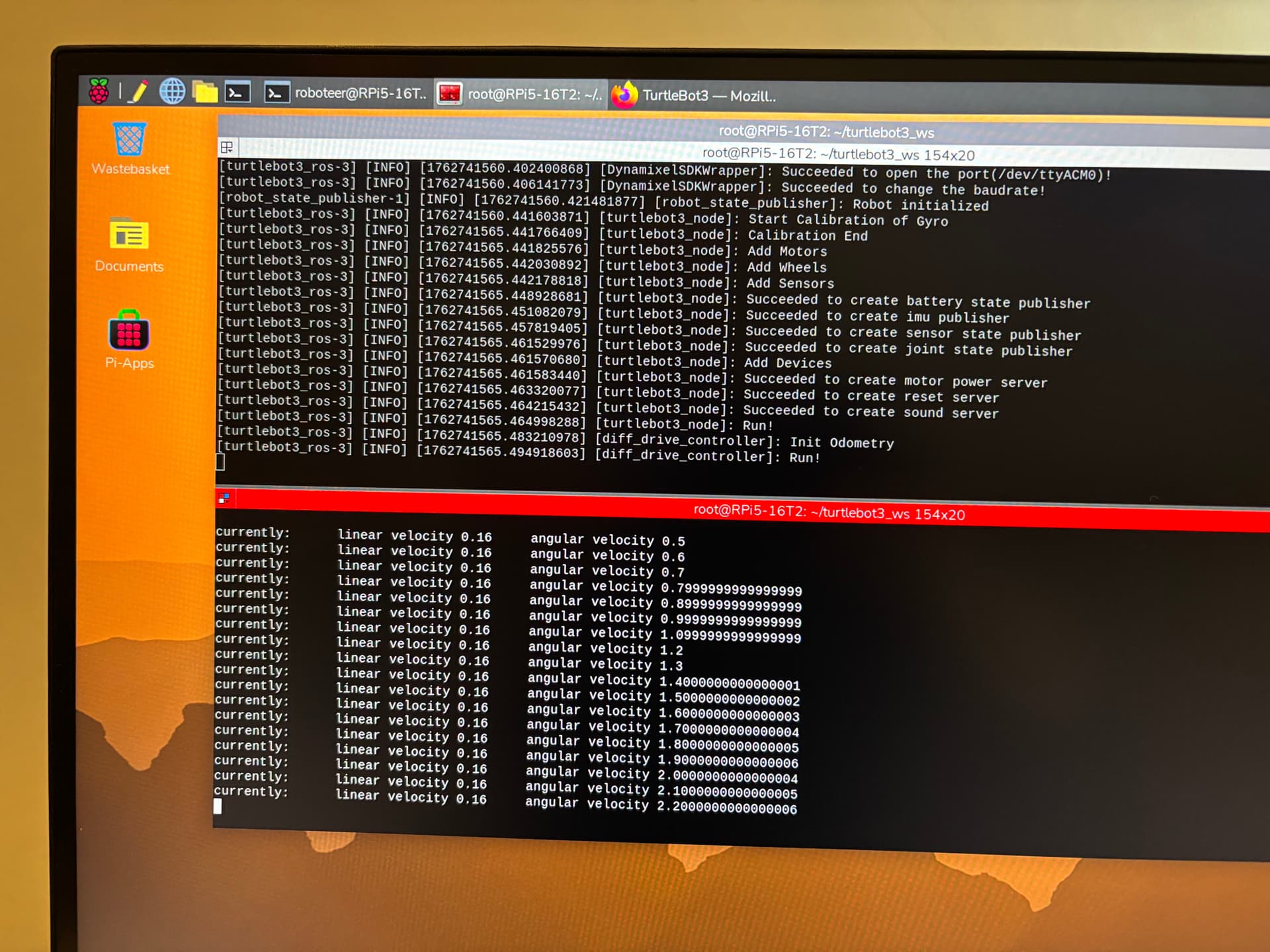
The next picture shows the steps for BRINGUP of the TB3 robot.
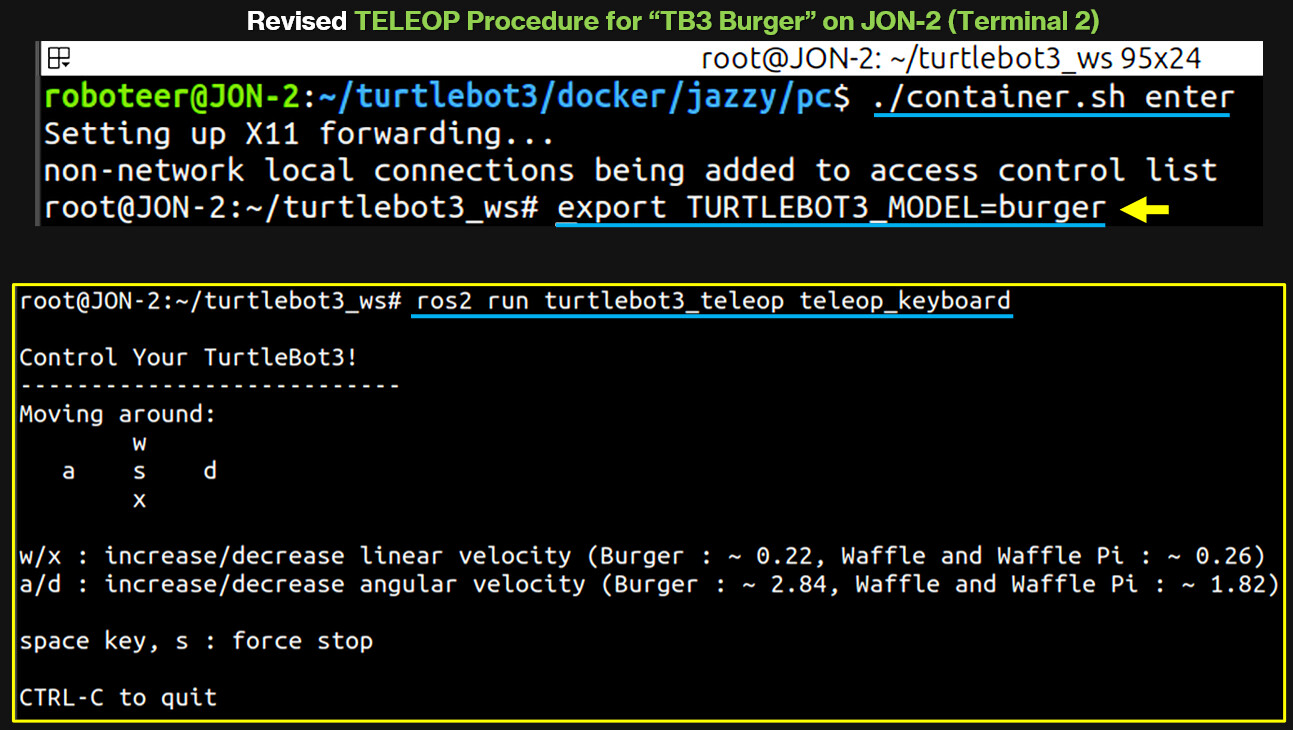
And the procedure for launching the TELEOP node is shown below
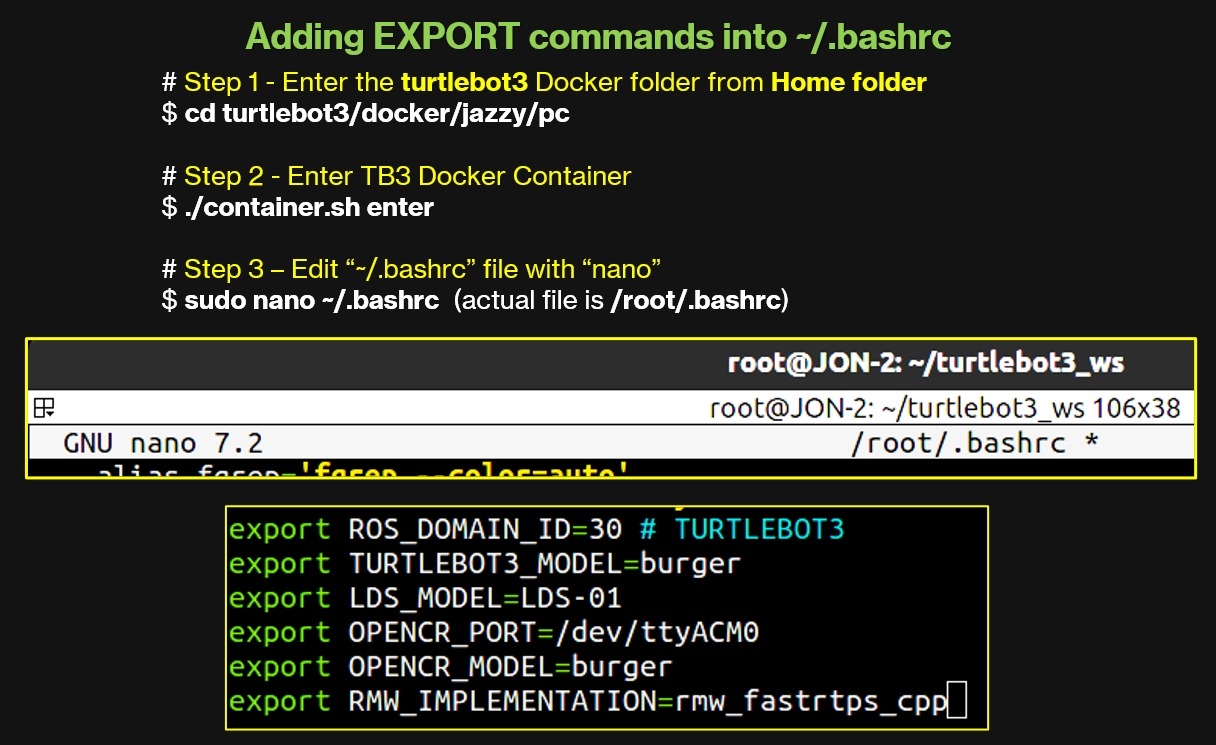
The previous EXPORT were executed with manual inputs, but the user can set them up inside the file ~/.bashrc file also - see picture below
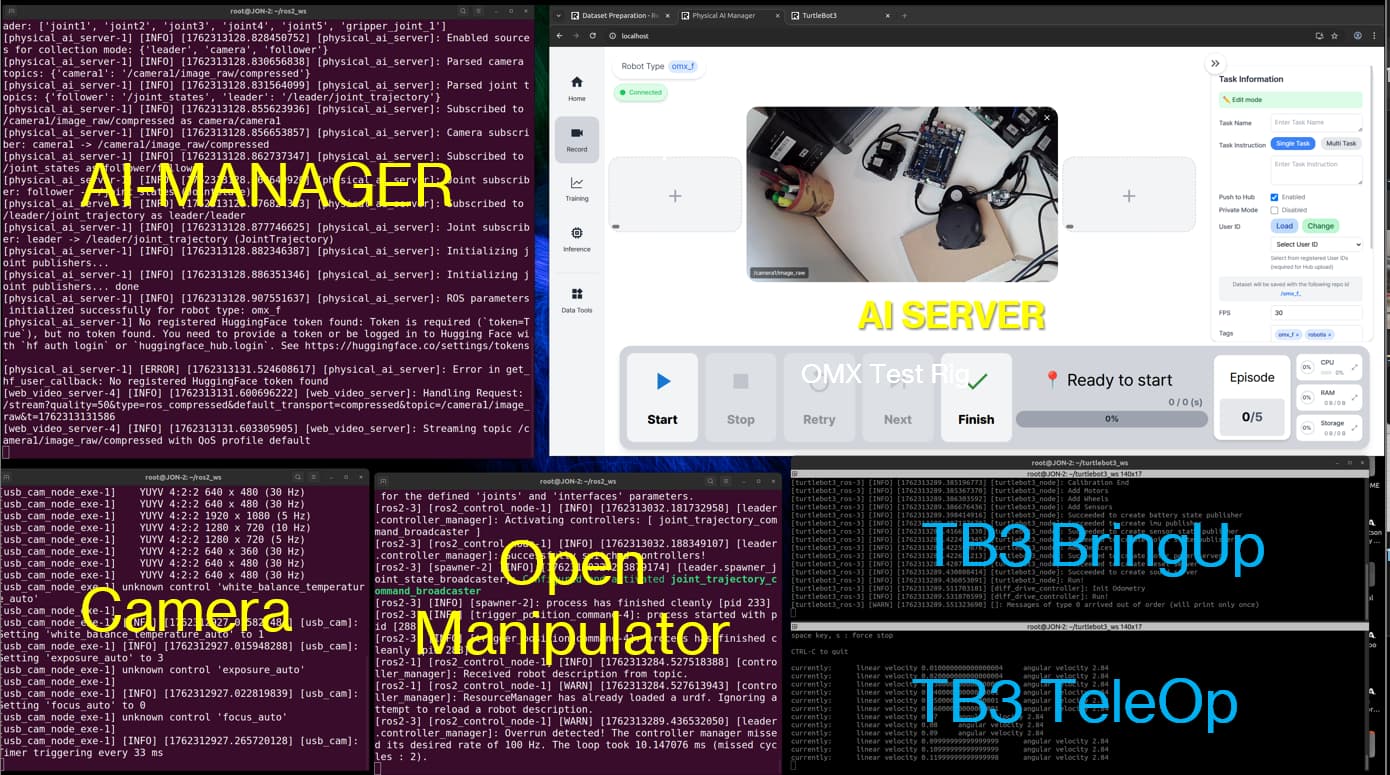
And this “new” TB3 operated fine as shown in the video below:
Next, the OMX Test Rig is added to the TB3 robot
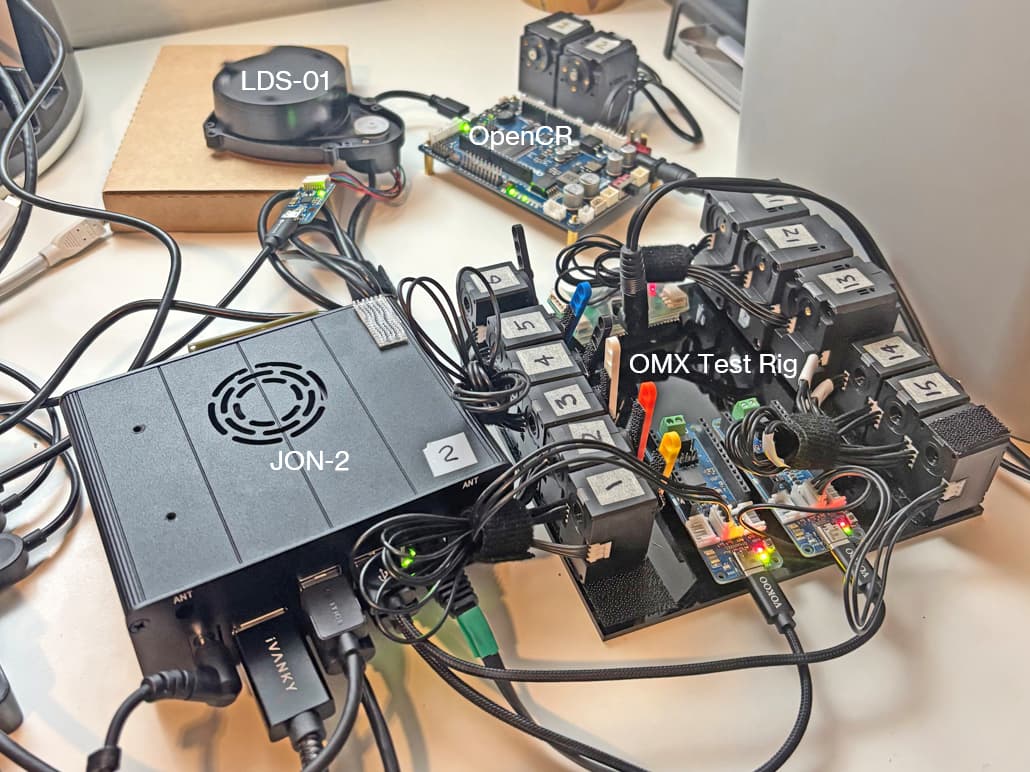
And they worked fine together too!!!
UPDATE 11/9/2025
I just applied the same procedures to an RPi5 16GB on TRIXIE OS, and everything worked for TB3 with RPi5 - same as for the JON. But RPi5 cannot run the OMX AI_Server tool as it required NVIDIA GPU (see the previous post mentioned at the beginning of this posting).

UPDATE 11/12/2025
This time around, I used an RPi5 8GB on TRIXIE OS and repeated the previous procedures. Because of less RAM, all installations took about twice longer than for the 16 GB configuration, but everything installed OK and most importantly operated OK!