Hello,
Thank you for welcoming me in. Please excuse the long post, I won’t do it again.
I recently retired and to keep busy I was planning to build an animated holiday display. The idea included using servos controlled by an Arduino Mega. I have a rudimentary understanding of electronics and programming and thought this would be an easy project.
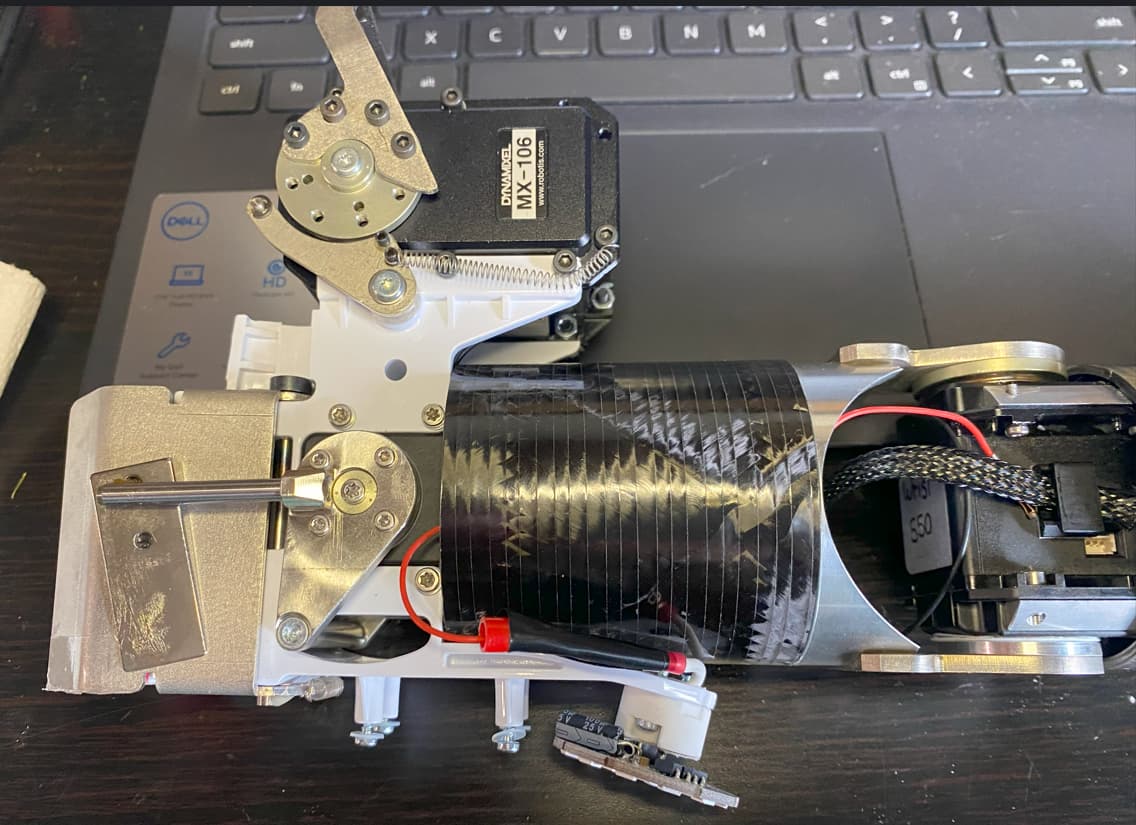
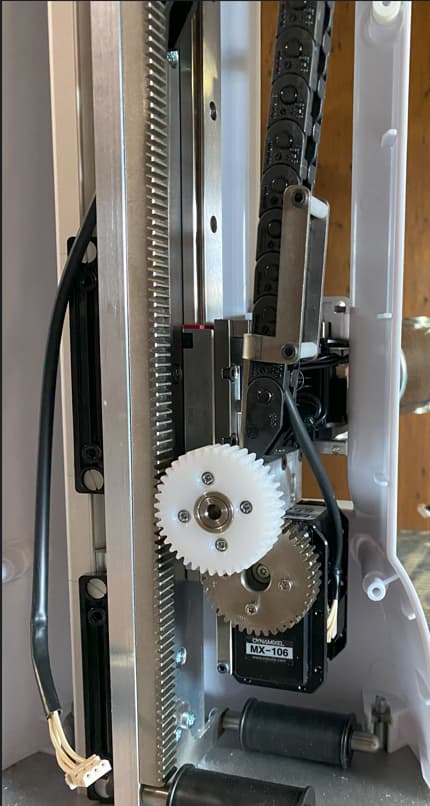
While looking for parts I saw 2 robotic arms in a lab surplus equipment auction. The only bid was $25 so I figured they were basic items or were scrap but might have some parts I could use and I bid $27, which was the winning bid. It turns out these are far from basic devices. There are 7 motors in each arm, a mixture of MX-28 and MX-106. Some are mounted in a way that makes it impossible to see the label without major disassembly so I don’t know how many of each there are. All units are TTL.
Arm lift = MX-106
Shoulder = MX-?
Elbow = MX-?
Wrist = MX-?
Thumb = MX-106
Gripper = MX-?
De-capper = MX-28
I started digging for info on the motors and was surprised at how different these devices are from the servos I knew about, but decided to continue with them. I ordered the Dynamixel starter set and downloaded the Dynamixel Wizard 2.0. I am not planning anything fancy, just basic movements possibly with some joystick input. Before I go any further I have a few questions.
If I do use these motors, Should I consider something other than the Mega for control?
If PC control is the proper choice, What would be the recommended software to use?
The documentation on series configuration with external power shows the power being supplied from end opposite the U2D2. Six of these motors are connected in series. I have traced the wires and the power is applied at the same end as the signal. Does it matter which end of the chain is connected to the power supply?
Am I crazy to use these and should I just go back to basic servos?


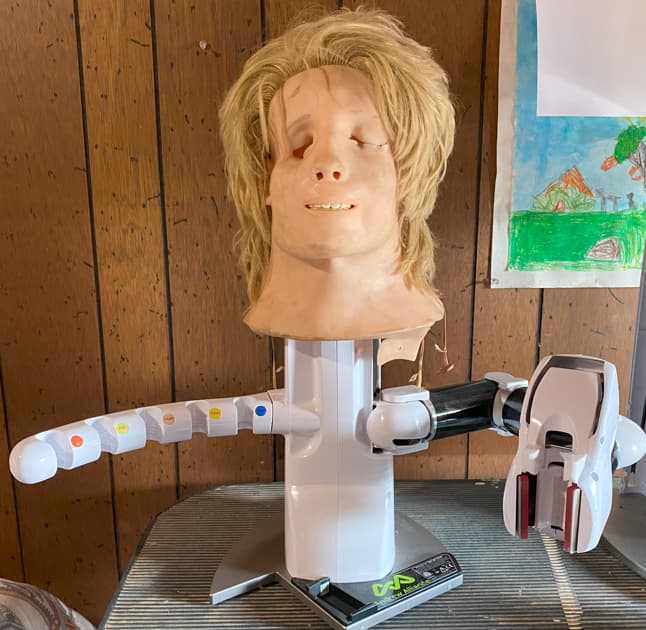
That is not my face or artwork in the pictures. ![]()
Thank you in advance for any advice.
Oldgeezer2
