I don’t know what Generation Robots meant by “5V Power” - you better ask them directly about it. I had never seen/read that description mentioned on the USA or Korea web sites.
The 4P JST Expansion Board is designed for RS485 type of actuators - see screen capture below.
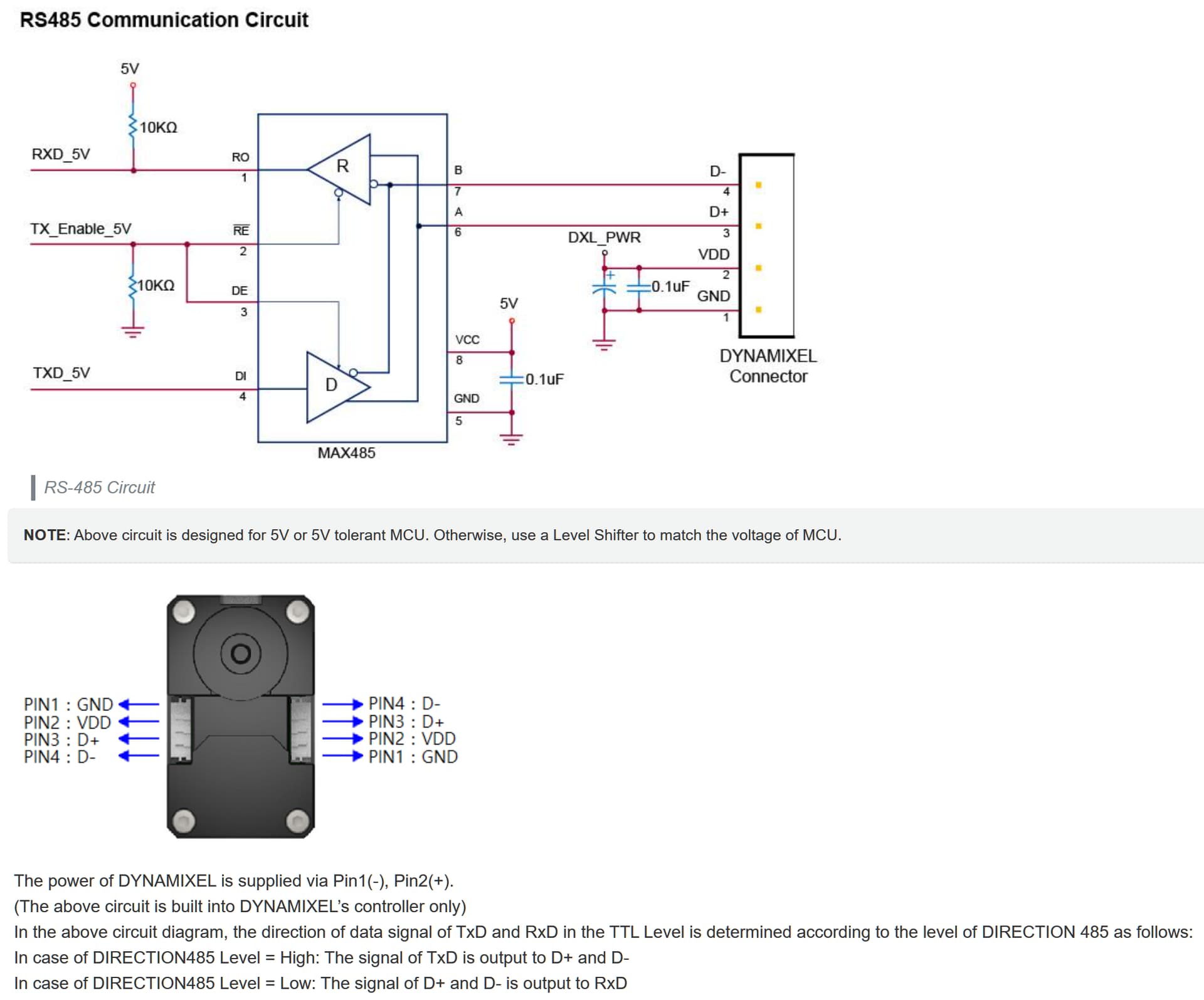
So VDD is the voltage used by the actual motor of the actuator: so, for the XM-540 and XM-430 it is 12 V. This is the Power Circuit via the U2D2 Power Hub.
D+ and D- are the data control lines: so, they are respectively at +5V and -5V. Not much current would go through them. This is the Control Circuit going through the U2D2 itself only. And here is where the 4P JST Expansion Boards are going to be used.
However, I had never seen an overall Max Current rating for these Expansion Boards - so may be @ROBOTISUSA can inquire with the engineers at the Korean HQ Office?