OpenCR을 사용해 OpenMANIPULATOR-X를 조작하고 있습니다.
emanual을 보면서 방법을 익히고 있는데 아래와 같은 오류가 발생합니다. 어떻게 해야 하는 게 좋을까요?
참고로 아두이노로 usb-to-dxl, 다이나믹셀 위자드는 모두 잘 되었습니다.
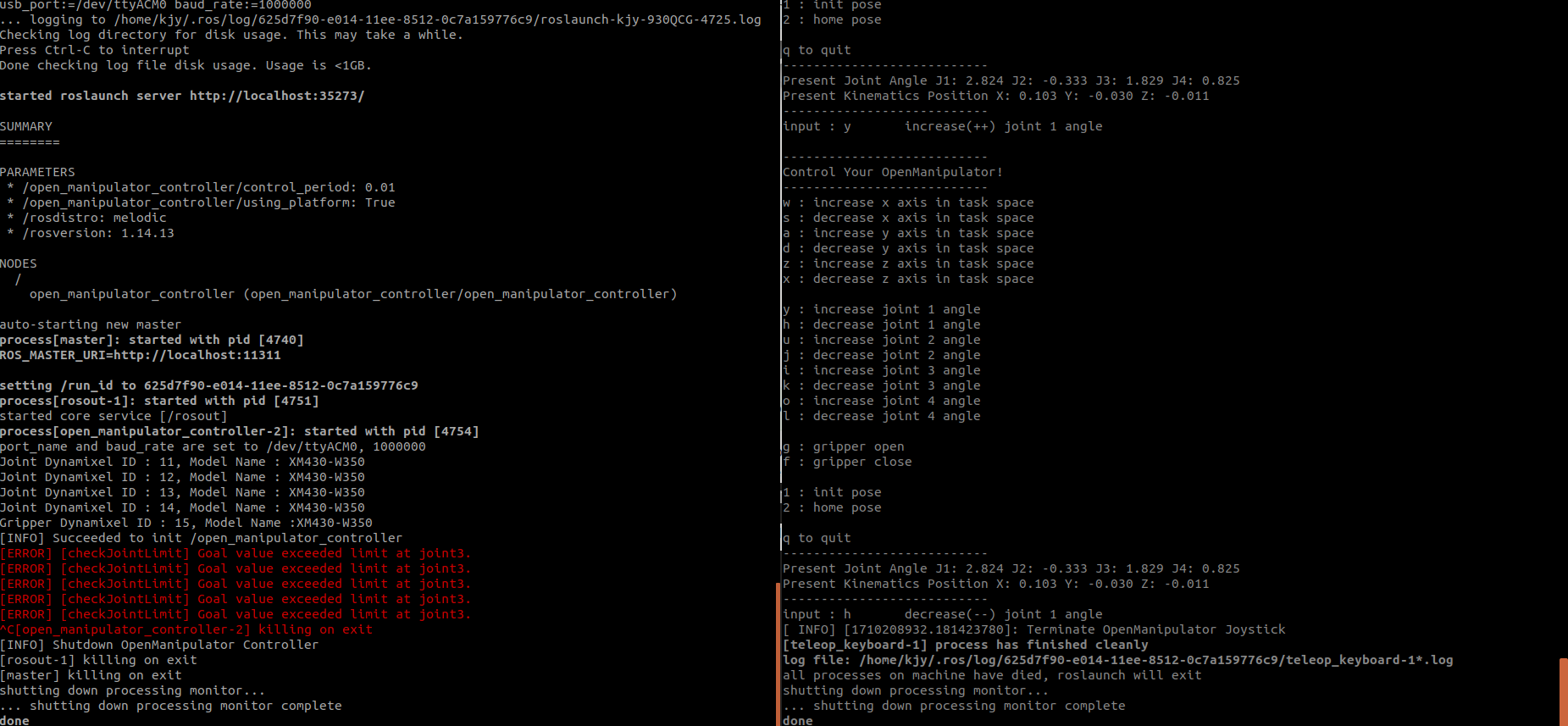
왼쪽: 다음 명령어를 입력한 터미널
$ roslaunch open_manipulator_controller open_manipulator_controller.launch usb_port:=/dev/ttyACM0 baud_rate:=1000000
오른쪽: 다음 명령어를 입력한 터미널
$ roslaunch open_manipulator_teleop open_manipulator_teleop_keyboard.launch
키보드로 그리퍼는 컨트롤이 가능한데, 다른 관절을 움직이려고 하면 빨간색처럼 "[checkJointLimit] Goal value exceeded limit at joint3"이라는 오류가 발생합니다.