Software
Ubuntu 22.04
ROS2 Humble
Hardware
OpenManipulator X (Model : XM430-W350-T)
안녕하세요. 고생 많으십니다.
현재 OpenManipulator X에 적용되어 사용 중인 다이나믹셀 중 일부(ID: 12) 모터 고장으로 인하여 동일 모델의 모터 구매 및 교체를 진행하였습니다.
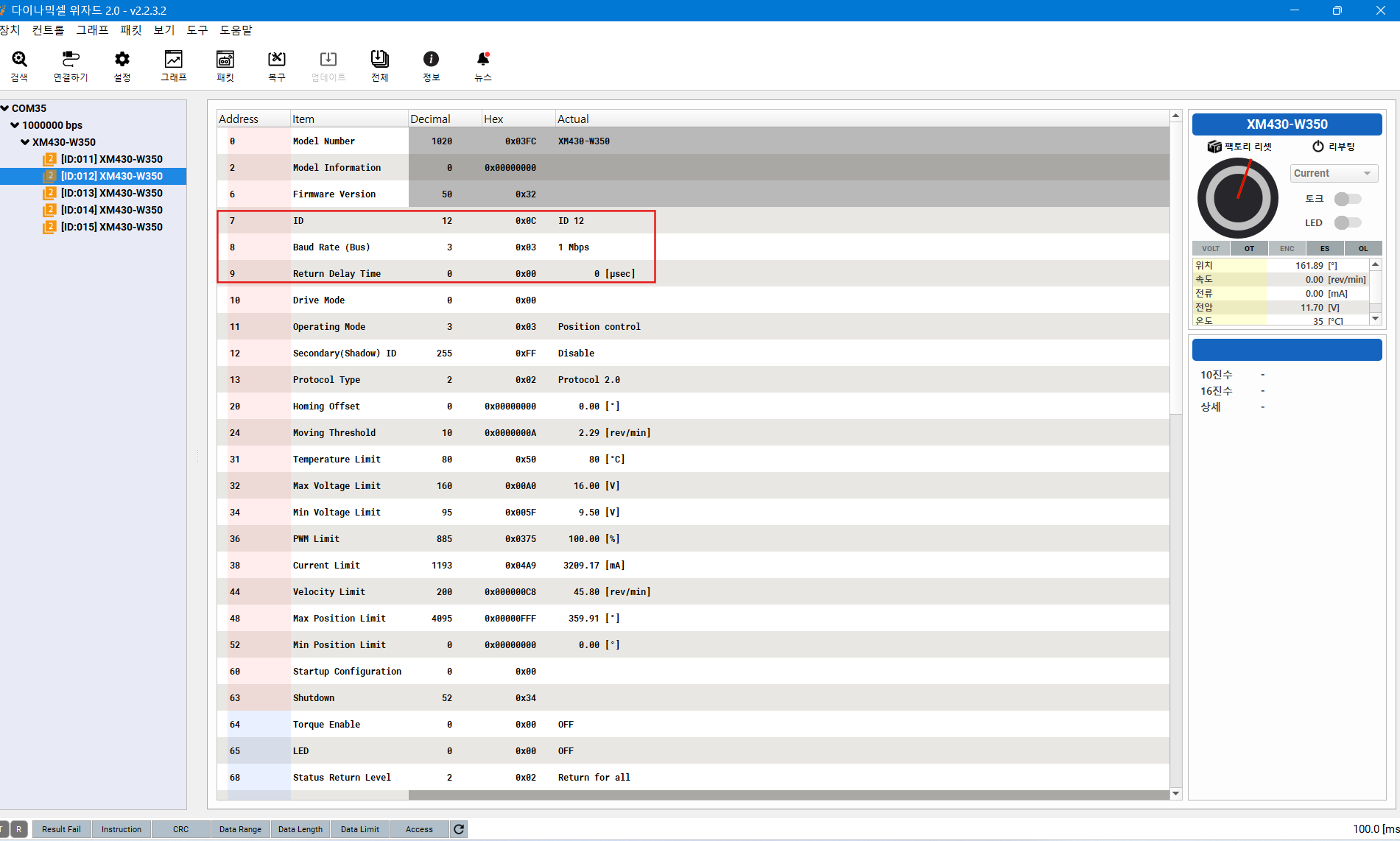
새로 교체한 다이나믹셀은 다른 다이나믹셀과 동일하게 Baudrate 및 Return Delay Time 값을 설정하였으며, ID 값은 교체한 '12’로 설정하였습니다.
교체 및 설정 완료 후 OpenManipulator 동작을 위해 hardware bringup 스크립트를 실행했고, 모든 다이나믹셀이 정상적으로 인식되어 ID11~15 Torque ON 상태되었음을 확인하였습니다.
ros2 launch open_manipulator_x_bringup hardware.launch.py
그런데 실행 이후 Communication Fail → SYNC_READ_FAIL 에러가 발생하며, 초기에는 Duration 이 8~20ms 정도로 낮게 나오다가, 약 2~3분 정도 시간이 지나면서 아래 이미지와 같이 Duration 값이 점차 높아지더니 더 이상 로그가 발생하지 않고, 매니퓰레이터도 제어가 되지 않는 것 같습니다.

위 증상이 나타났을 때, U2D2의 전원 LED(빨간색)는 켜져 있으나, RX/TX LED는 점멸되지 않고 있습니다.
Q1. 어떤 문제로 위와 같은 증상이 발생할수 있는지요 ?
Q2. 혹시 SYNC_READ_FAIL 에서 Duration Limit이 500ms로 설정되어 있는 것 같은데, 해당 Limit을 해제할 수 있는 방안이 있을까요?