안녕하세요.
현재 OpenManipulator-X를 구입하여 개발 중에 있습니다.
기존의 Joint4에 장착된 그리퍼를 제거하고, LCD 디스플레이를 장착하려고 하는 상황입니다.
[예시 이미지]
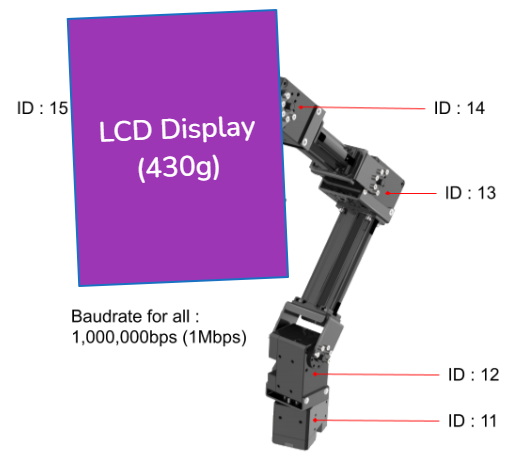
LCD와 기타 부품들 (이하 '머리’라 칭함) 무게를 포함하니 대략 500g 내외로 무게가 측정 되었고, 이는 OpenManipulator-X의 최대 하중인 500g으로 충분히 견딜 수 있는 것으로 알고 있습니다.
머리를 장착 후 로봇 팔은 지정된 위치로 움직이는 것처럼 보이나, 목표 위치로 이동 후 매니퓰레이터가 마치 맥박이 뛰는 것과 같이 들썩이는 증상이 나타나고 있습니다.
이 증상은 머리를 장착하기 이전 그리퍼가 장착된 상태에서도 간헐적으로 발생하였고 이때 그리퍼에 별도의 하중을 부여하지 않은 상태였습니다.
이러한 증상이 나타나는 이유가 최대 하중인 500g을 초과해서 발생하는 문제인가요?
위 증상을 해결하기 위해서 어떤 조치를 취할 수 있을지 도움이 절실합니다.
- 추가) 하중을 가하지 않더라도, 목표 위치 도달하고나서도 다이나믹셀이 위치를 보정하기 위해 빈번하게 움직이는 것 같습니다.
항상 친절한 대응에 감사드리며. 많은 도움 부탁 드립니다. ![]()