1.System(hardware)
Turtlebot3 waffle_pi with OpenManipulatorX
( the date of purchase: 2024.11. )
2.Environment
Remote Pc: ubuntu 20.04(foxy)
turtlebot : custom image from TurtleBot3 (foxy)
3.Issue Description
OpenManipulatorX 연결 후 biringup에서 에러가 나고 있습니다.
어떻게 처리할 수 있는지 도움을 부탁드립니다.
emanual:
3.1 먼저, turtlebot3(waffle_pi)는 매뉴얼(3.Quick Start Guide)데로 biringup되고 Remote pc에서 keybord로 동작이 되었습니다.
3.2 매뉴얼의(7.Manipulation)의 7.2 software setup데로 Turtlebot3 SBC에 패키지를 설치 후 빌드진행
추가로 패키지를 설치하여 빌드는 완료되었습니다.
3.3 OpenManipulatorX 조립 연결 후 , 7.4 OpenCR steup(Turtlebot3 SBC)을 완료했습니다.
( 버전 및 jump_to_fw : 메시지 확인완료)
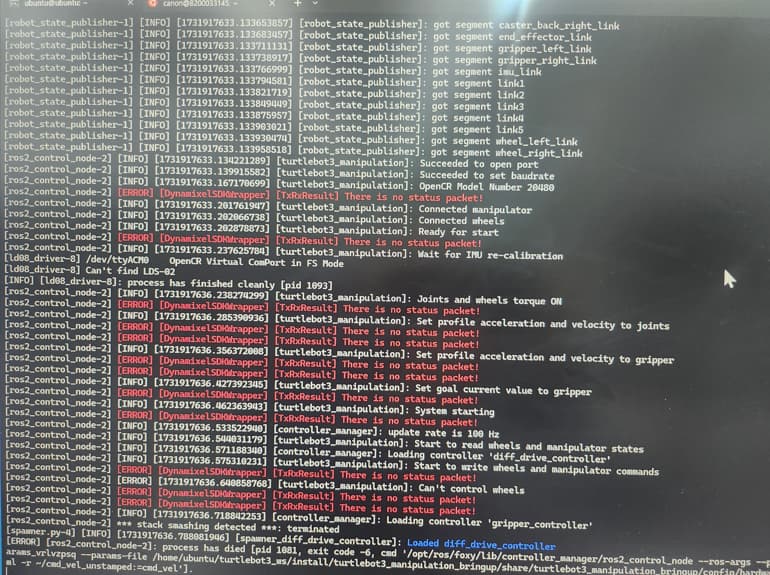
3.4 TurtleBot3 SBC에서 bringup을 진행하였으나, 아래와 같은 에러 메시지가 출력되었습니다.
*bringup 후 매니플레이터는 기본자세로 움직입니다.
- Open a terminal from the TurtleBot3 SBC.
- $ ros2 launch turtlebot3_manipulation_bringup
hardware.launch.py 실행
- ** error message
[ros2_control_node-2] [INFO] [1731373761.863243381] [turtlebot3_manipulation]: Ready for start
[ros2_control_node-2] [INFO] [1731373761.897400994] [turtlebot3_manipulation]: Wait for IMU re-calibration
[ros2_control_node-2] [ERROR] [DynamixelSDKWrapper] [TxRxResult] There is no status packet!
ubuntu@ubuntu:~$ ros2 launch turtlebot3_manipulation_bringup hardware.launch.py
[INFO] [launch]: All log files can be found below /home/ubuntu/.ros/log/2024-11-12-01-09-19-027937-ubuntu-1248
[INFO] [launch]: Default logging verbosity is set to INFO
[INFO] [robot_state_publisher-1]: process started with pid [1252]
[INFO] [ros2_control_node-2]: process started with pid [1254]
[INFO] [spawner.py-3]: process started with pid [1256]
[INFO] [spawner.py-4]: process started with pid [1258]
[INFO] [spawner.py-5]: process started with pid [1260]
[INFO] [spawner.py-6]: process started with pid [1262]
[INFO] [spawner.py-7]: process started with pid [1264]
[INFO] [ld08_driver-8]: process started with pid [1266]
[robot_state_publisher-1] Parsing robot urdf xml string.
[robot_state_publisher-1] Link base_link had 8 children
[robot_state_publisher-1] Link link1 had 1 children
[robot_state_publisher-1] Link link2 had 1 children
[robot_state_publisher-1] Link link3 had 1 children
[robot_state_publisher-1] Link link4 had 1 children
[robot_state_publisher-1] Link link5 had 3 children
[robot_state_publisher-1] Link end_effector_link had 0 children
[robot_state_publisher-1] Link gripper_left_link had 0 children
[robot_state_publisher-1] Link gripper_right_link had 0 children
[robot_state_publisher-1] Link camera_link had 1 children
[robot_state_publisher-1] Link camera_rgb_frame had 1 children
[robot_state_publisher-1] Link camera_rgb_optical_frame had 0 children
[robot_state_publisher-1] Link caster_back_left_link had 0 children
[robot_state_publisher-1] Link caster_back_right_link had 0 children
[robot_state_publisher-1] Link imu_link had 0 children
[robot_state_publisher-1] Link base_scan had 0 children
[robot_state_publisher-1] Link wheel_left_link had 0 children
[robot_state_publisher-1] Link wheel_right_link had 0 children
[robot_state_publisher-1] [INFO] [1731373761.776940494] [robot_state_publisher]: got segment base_footprint
[robot_state_publisher-1] [INFO] [1731373761.777344196] [robot_state_publisher]: got segment base_link
[robot_state_publisher-1] [INFO] [1731373761.777420262] [robot_state_publisher]: got segment base_scan
[robot_state_publisher-1] [INFO] [1731373761.777456711] [robot_state_publisher]: got segment camera_link
[robot_state_publisher-1] [INFO] [1731373761.777487845] [robot_state_publisher]: got segment camera_rgb_frame
[robot_state_publisher-1] [INFO] [1731373761.777520090] [robot_state_publisher]: got segment camera_rgb_optical_frame
[robot_state_publisher-1] [INFO] [1731373761.777550520] [robot_state_publisher]: got segment caster_back_left_link
[robot_state_publisher-1] [INFO] [1731373761.777580636] [robot_state_publisher]: got segment caster_back_right_link
[robot_state_publisher-1] [INFO] [1731373761.777612325] [robot_state_publisher]: got segment end_effector_link
[robot_state_publisher-1] [INFO] [1731373761.777642144] [robot_state_publisher]: got segment gripper_left_link
[robot_state_publisher-1] [INFO] [1731373761.777671055] [robot_state_publisher]: got segment gripper_right_link
[robot_state_publisher-1] [INFO] [1731373761.777699892] [robot_state_publisher]: got segment imu_link
[robot_state_publisher-1] [INFO] [1731373761.777729748] [robot_state_publisher]: got segment link1
[robot_state_publisher-1] [INFO] [1731373761.777760641] [robot_state_publisher]: got segment link2
[robot_state_publisher-1] [INFO] [1731373761.777791849] [robot_state_publisher]: got segment link3
[robot_state_publisher-1] [INFO] [1731373761.777820557] [robot_state_publisher]: got segment link4
[robot_state_publisher-1] [INFO] [1731373761.777849542] [robot_state_publisher]: got segment link5
[robot_state_publisher-1] [INFO] [1731373761.777878120] [robot_state_publisher]: got segment wheel_left_link
[robot_state_publisher-1] [INFO] [1731373761.777907031] [robot_state_publisher]: got segment wheel_right_link
[ros2_control_node-2] [INFO] [1731373761.789718694] [turtlebot3_manipulation]: Succeeded to open port
[ros2_control_node-2] [INFO] [1731373761.795261217] [turtlebot3_manipulation]: Succeeded to set baudrate
[ros2_control_node-2] [INFO] [1731373761.826414649] [turtlebot3_manipulation]: OpenCR Model Number 20480
[ros2_control_node-2] [ERROR] [DynamixelSDKWrapper] [TxRxResult] There is no status packet!
[ros2_control_node-2] [INFO] [1731373761.861036899] [turtlebot3_manipulation]: Connected manipulator
[ros2_control_node-2] [INFO] [1731373761.861393576] [turtlebot3_manipulation]: Connected wheels
[ros2_control_node-2] [INFO] [1731373761.863243381] [turtlebot3_manipulation]: Ready for start
[ros2_control_node-2] [INFO] [1731373761.897400994] [turtlebot3_manipulation]: Wait for IMU re-calibration
[ros2_control_node-2] [ERROR] [DynamixelSDKWrapper] [TxRxResult] There is no status packet!
[ld08_driver-8] /dev/ttyACM0 OpenCR Virtual ComPort in FS Mode
[ld08_driver-8] /dev/ttyUSB0 CP2102 USB to UART Bridge Controller
[ld08_driver-8] FOUND LDS-02
[ld08_driver-8] LDS-02 started successfully
[ros2_control_node-2] [INFO] [1731373764.932112047] [turtlebot3_manipulation]: Joints and wheels torque ON
[ros2_control_node-2] [ERROR] [DynamixelSDKWrapper] [TxRxResult] There is no status packet!
[ros2_control_node-2] [INFO] [1731373764.982236628] [turtlebot3_manipulation]: Set profile acceleration and velocity to joints
[ros2_control_node-2] [ERROR] [DynamixelSDKWrapper] [TxRxResult] There is no status packet!
[ros2_control_node-2] [ERROR] [DynamixelSDKWrapper] [TxRxResult] There is no status packet!
[ros2_control_node-2] [INFO] [1731373765.052213223] [turtlebot3_manipulation]: Set profile acceleration and velocity to gripper
[ros2_control_node-2] [ERROR] [DynamixelSDKWrapper] [TxRxResult] There is no status packet!
[ros2_control_node-2] [ERROR] [DynamixelSDKWrapper] [TxRxResult] There is no status packet!
[ros2_control_node-2] [INFO] [1731373765.123267688] [turtlebot3_manipulation]: Set goal current value to gripper
[ros2_control_node-2] [ERROR] [DynamixelSDKWrapper] [TxRxResult] There is no status packet!
[ros2_control_node-2] [INFO] [1731373765.159267509] [turtlebot3_manipulation]: System starting
[ros2_control_node-2] [ERROR] [DynamixelSDKWrapper] [TxRxResult] There is no status packet!
[ros2_control_node-2] [INFO] [1731373765.228683466] [controller_manager]: update rate is 100 Hz
[ros2_control_node-2] [INFO] [1731373765.239688846] [turtlebot3_manipulation]: Start to read wheels and manipulator states
[ros2_control_node-2] [INFO] [1731373765.266425401] [turtlebot3_manipulation]: Start to write wheels and manipulator commands
[ros2_control_node-2] [ERROR] [DynamixelSDKWrapper] [TxRxResult] There is no status packet!
[ros2_control_node-2] [ERROR] [DynamixelSDKWrapper] [TxRxResult] There is no status packet!
[ros2_control_node-2] [ERROR] [1731373765.338334994] [turtlebot3_manipulation]: Can't control joints
[ros2_control_node-2] [INFO] [1731373765.362430967] [controller_manager]: Loading controller 'arm_controller'
[ros2_control_node-2] [ERROR] [DynamixelSDKWrapper] [TxRxResult] There is no status packet!
[ros2_control_node-2] [ERROR] [1731373765.374674970] [turtlebot3_manipulation]: Can't control gripper
[ros2_control_node-2] [ERROR] [DynamixelSDKWrapper] [TxRxResult] There is no status packet!
[ros2_control_node-2] *** stack smashing detected ***: terminated
[ERROR] [ros2_control_node-2]: process has died [pid 1254, exit code -6, cmd '/opt/ros/foxy/lib/controller_manager/ros2_control_node --ros-args --params-file /tmp/launch_params_611sv5vu --params-file /home/ubuntu/turtlebot3_ws/install/turtlebot3_manipulation_bringup/share/turtlebot3_manipulation_bringup/config/hardware_controller_manager.yaml -r ~/cmd_vel_unstamped:=cmd_vel'].
- 터틀봇 구매하고 ROS를 처음 설치해 보기 때문에,
위의 에러메시지에 대해 어떻게 진행해야 할지 잘 모르겠습니다.
도움을 부탁드립니다.
I followed the instructions in TurtleBot3 2 and chose the foxy option.
I added some packages while building the turtlebot3_manipulation package.
I then rebuilt colcon and it worked fine. However, when I try to use bring up, I get the above error.
ros2 launch turtlebot3_manipulation_bringup hardware.launch.py
I am unsure how to progress.
I would appreciate any help.
#.bashrc
alias nb='nano ~/.bashrc'
alias eb='nano ~/.bashrc'
alias sb='source ~/.bashrc'
alias gs='git status'
alias gp='git pull'
alias cw='cd ~/turtlebot3_ws'
alias cs='cd ~/turtlebot3_ws/src'
alias cb='cd ~/turtlebot3_ws && colcon build --symlink-install && source ~/.bashrc'
source /opt/ros/foxy/setup.bash
source ~/turtlebot3_ws/install/local_setup.bash
export ROS_DOMAIN_ID=30 # Default ROS2 Domain ID for TurtleBot3
source ~/turtlebot3_ws/install/setup.bash
export LDS_MODEL=LDS-02
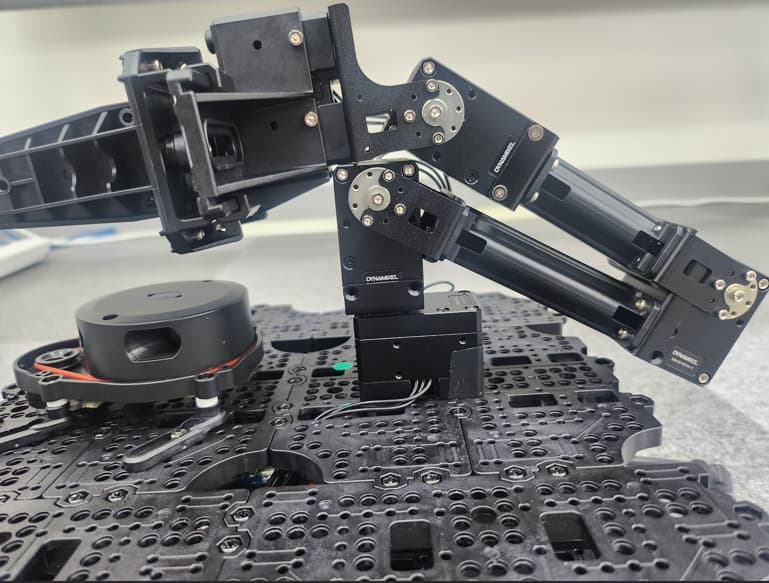
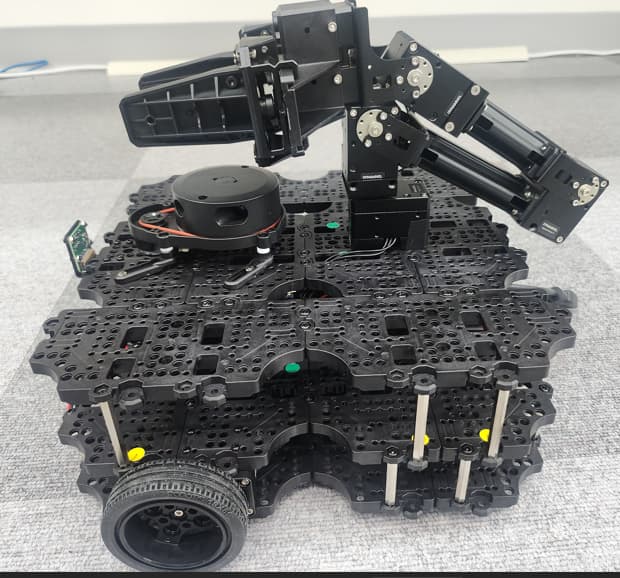
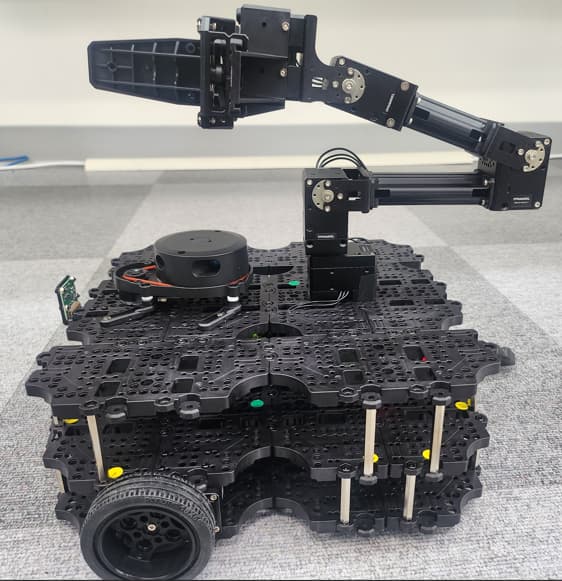
사진추가
터틀봇_매니플레이터 전원ON상태
터틀봇_매니플레이터 - SBC에서 bring up
Bringup 후 에러 메시지
- [SBC]ubuntu@ubuntu:~$ ros2 launch turtlebot3_manipulation_bringup hardware.launch.py