Issue:
Hi everyone. We’re using dynamixel servos in a robotic arm, and want it to be compliant. The initial implementation was done in Position Control, and we are able to get really smooth movement. However, when switching to Current-Based Control the same movement is much more jittery/has more vibration.
Why is the behaviour different? What is introducing shakiness in the motor output?
How can we achieve the same smooth performance while also limiting the current?
The only change made is setting the operating mode to Current-Based control, with the current limits set to be the max value of the motor.
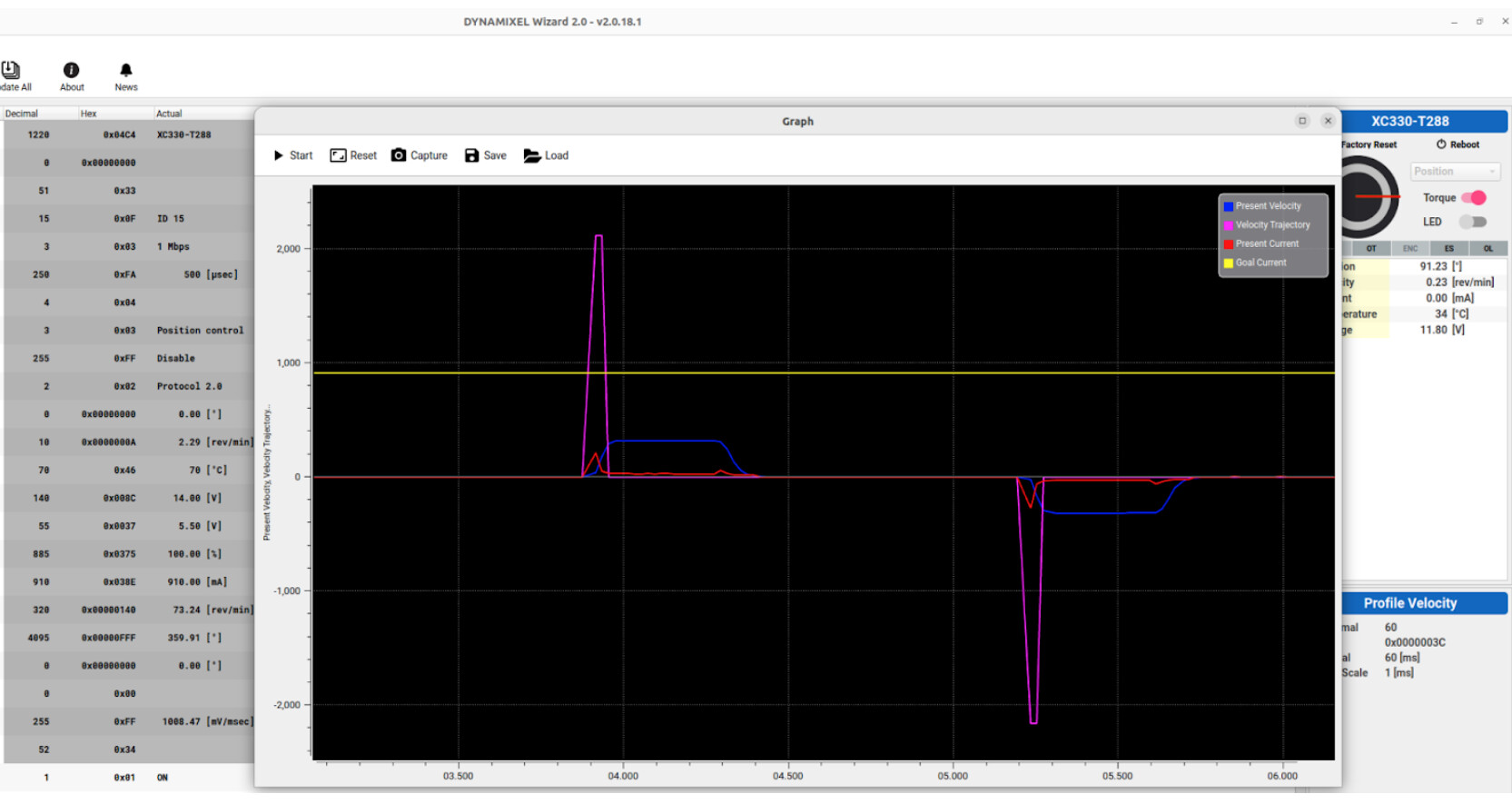
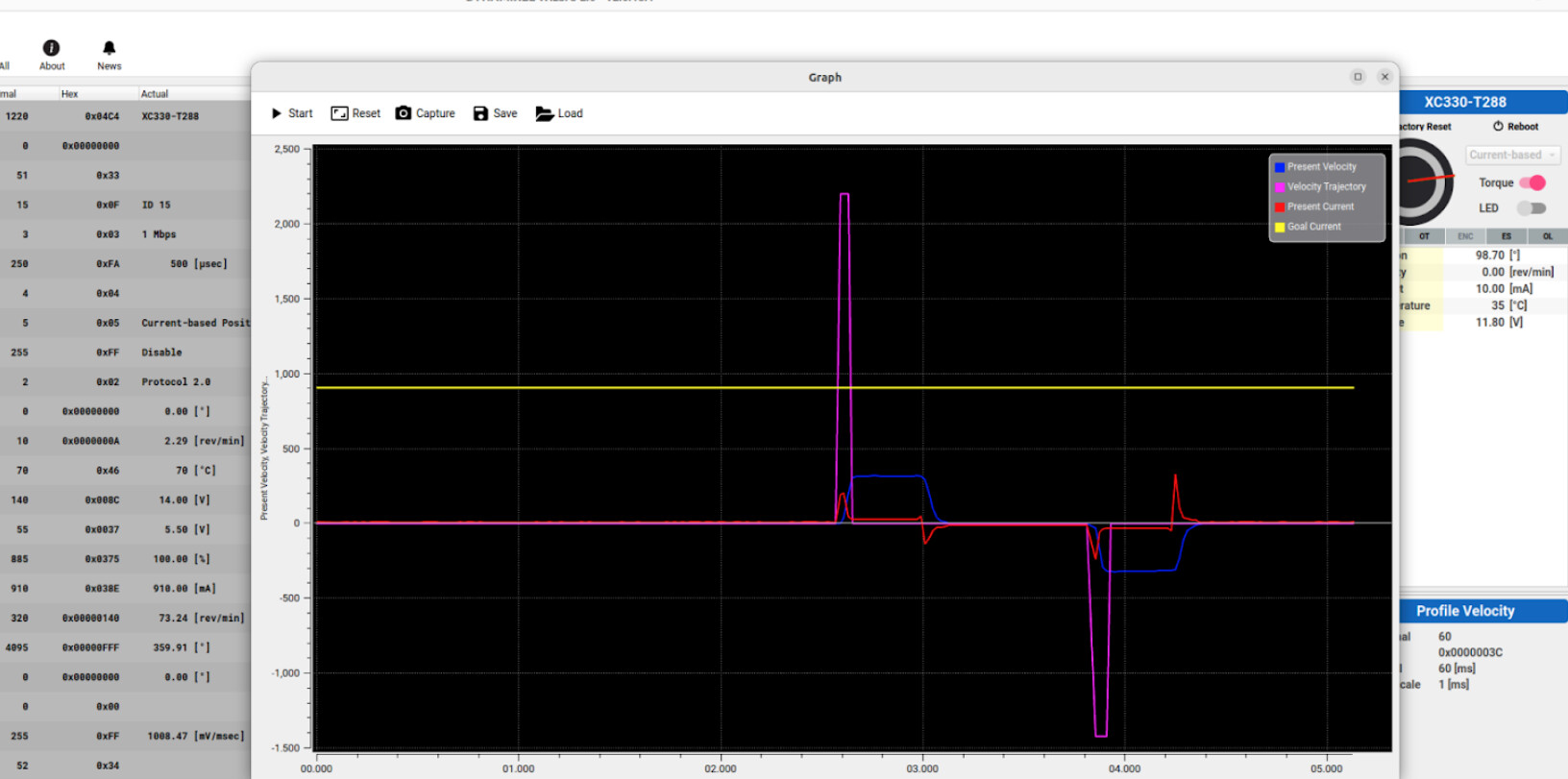
Behaviour captured using the dynamixel wizard, moving the motor between two positions
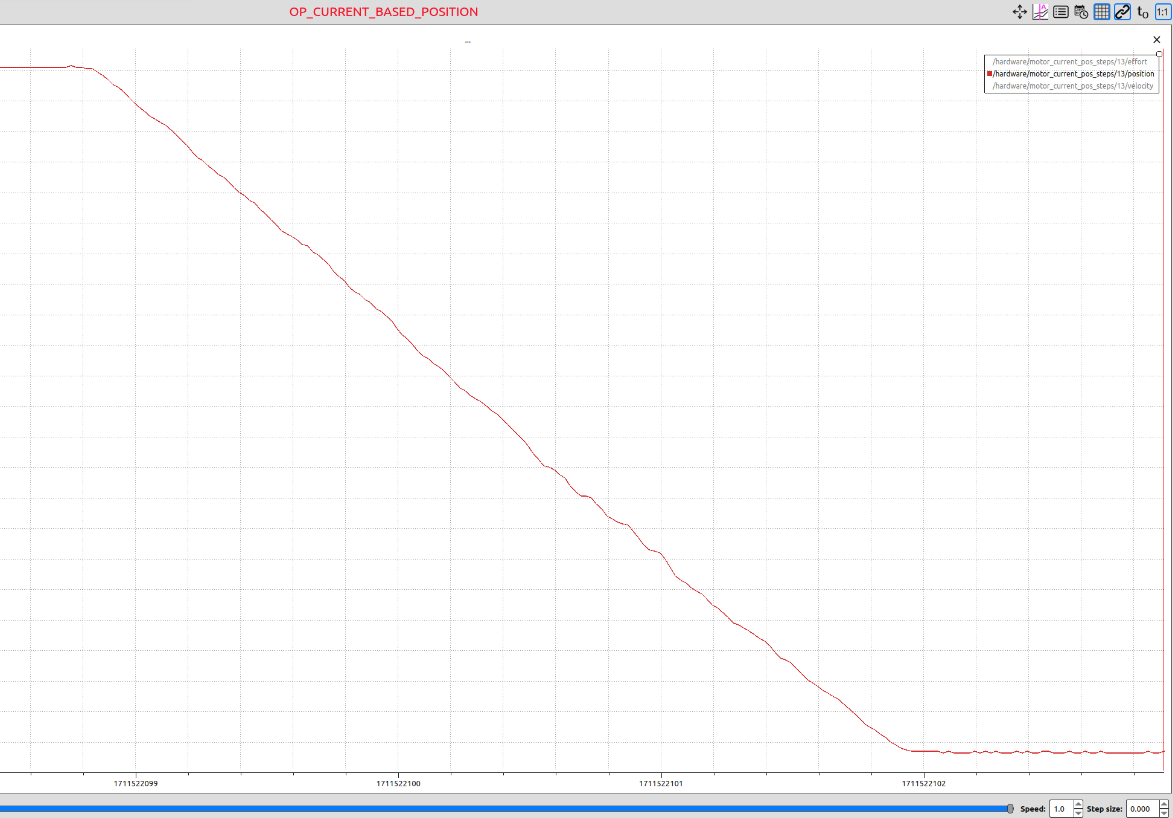
With position control:
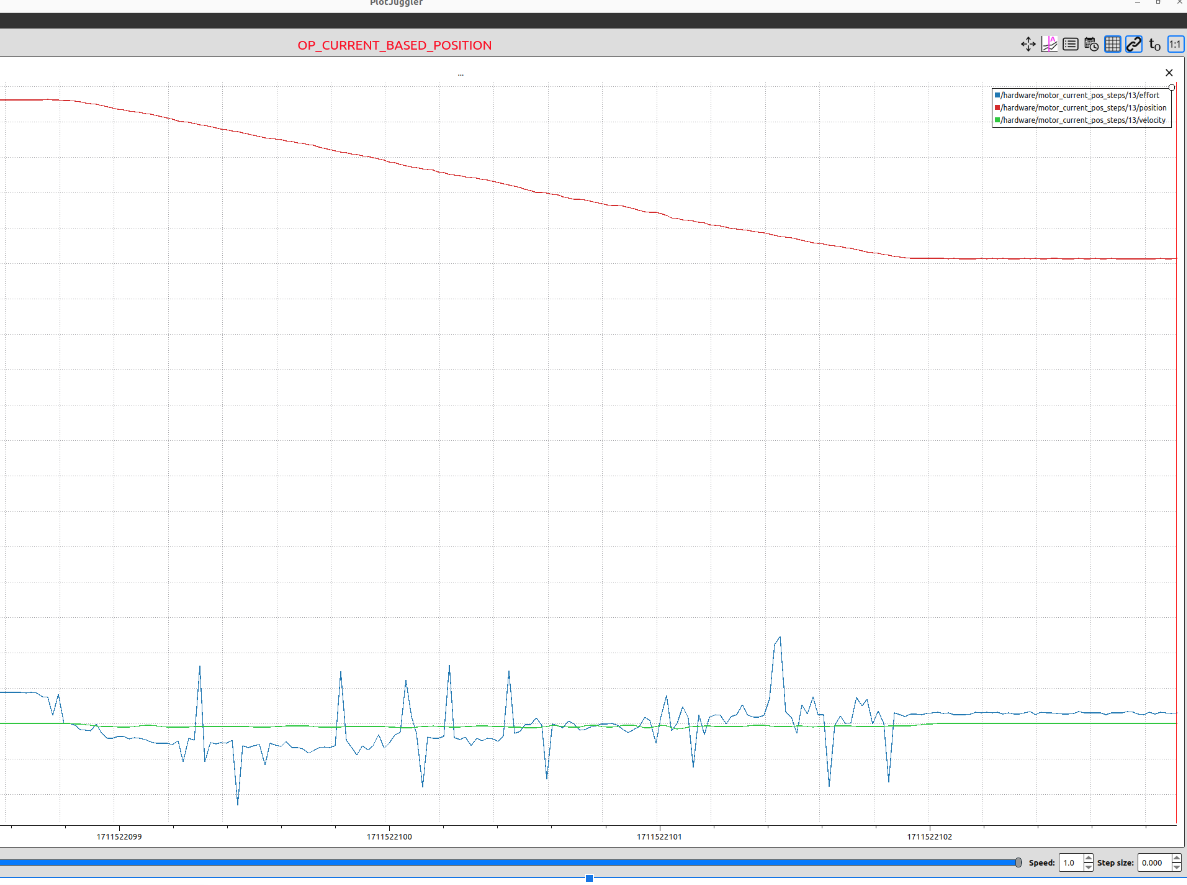
With current based position control:
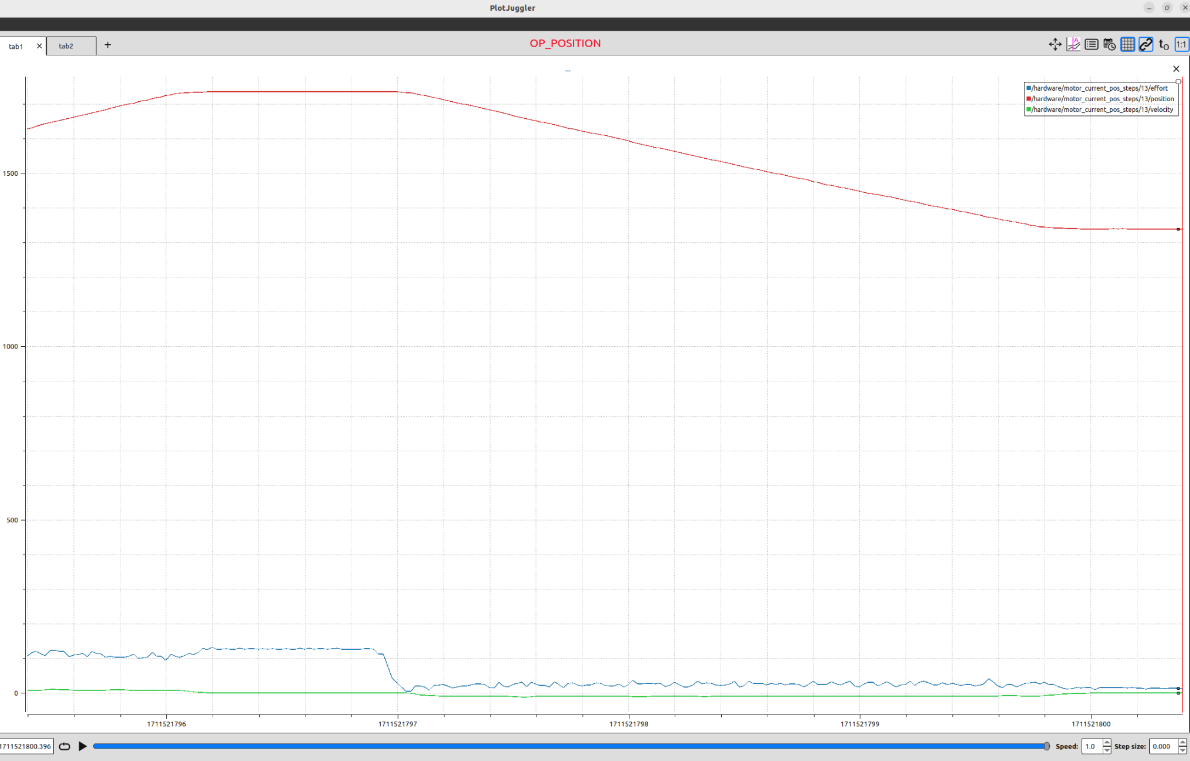
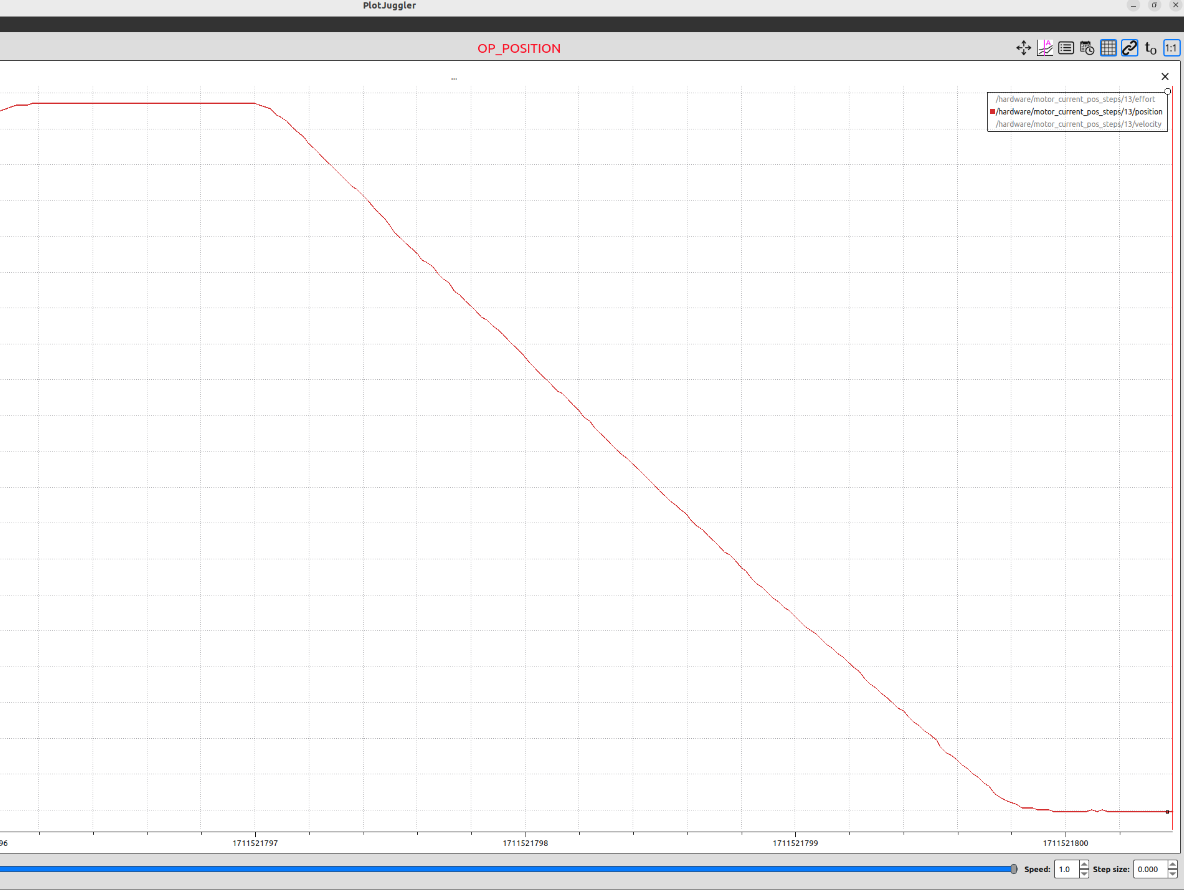
Behaviour moving the robotic arm up and down
DYNAMIXEL Servo:
xm540-w270-t, plus others but the shaky behaviour is seem most obviously in this motor
DYNAMIXEL Controller:
Dynamixel shield for arduino.
Software Interface:
Dynamixel2Arduino, running on teensyduino