Issue:
Hi,
We are currently using 12 XC430-W150-T servos for an R&D humanoid, thus we need the correct characterization (mass, inertia, friction…) of the servos for our simulations.
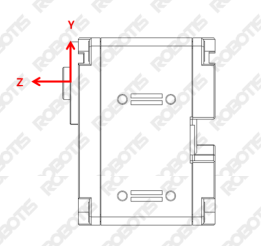
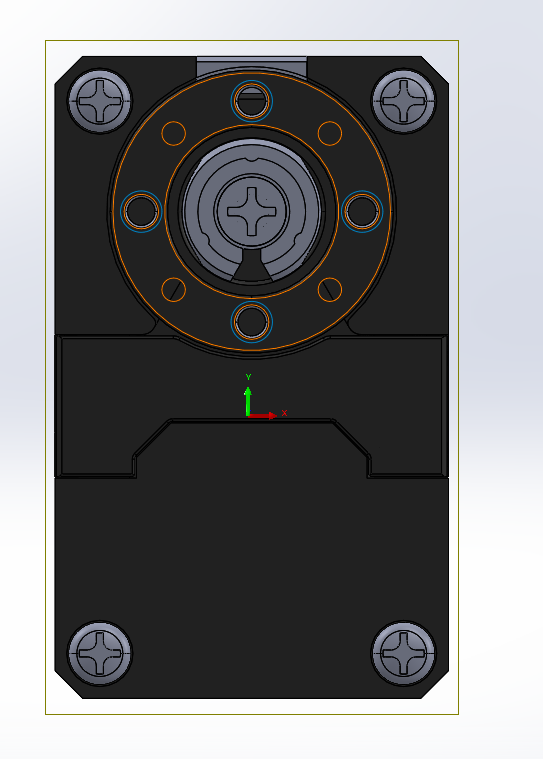
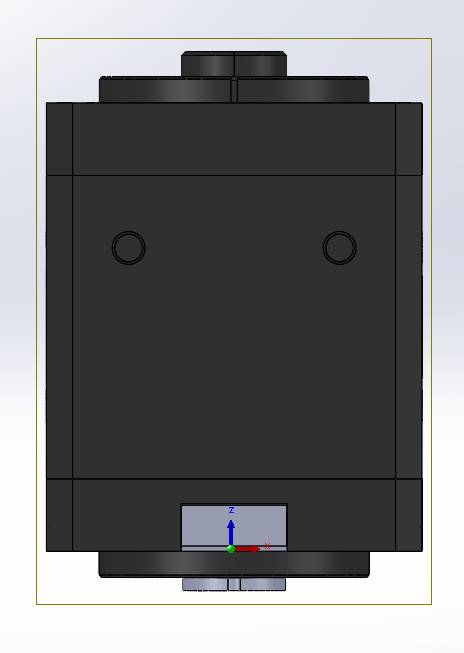
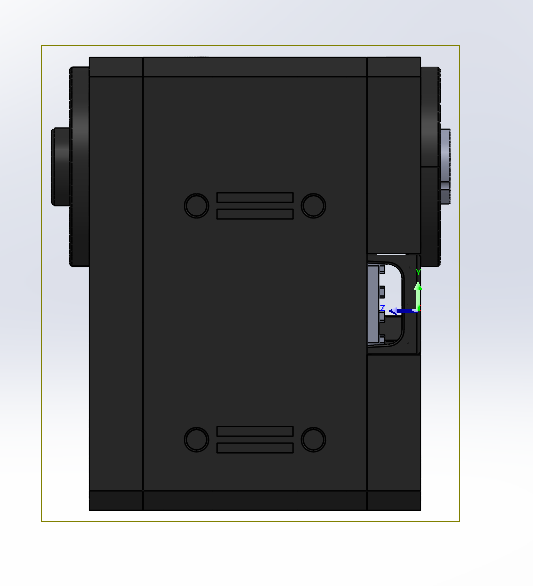
We are using Solidworks with the provided .step file and the moment of inertia provided in the e-manual pdf (see attachment) : When entering the value for the center of mass we noticed that the center is weirdly positioned, is this normal ?
We provided pictures of our COM given your data, is this accurate? (from our calculation the z component seems wrong)
Best regards
DYNAMIXEL Servo:
12 servos XC430-W150