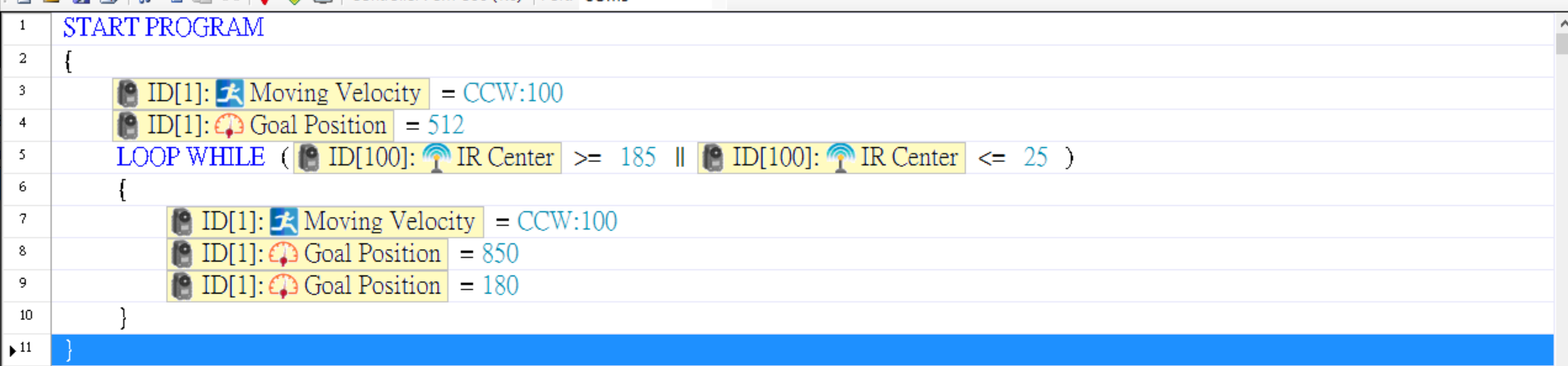
I want motor1 fist move to 512 then when sensor conditions met motor1 move to 850 then move to 180 .Constantly going back and forth from 850 to 180
But I found some problem
1.when sensor condition was met in the first the motor1 didn’t move to 512
2.when sensor condition was me, the motor1only move to 850 didn’t go back to 180
The appropriate solution will depend on the type of actuator used. Is it an older AX or MX actuator? Or is it a newer XL type of actuator?
Also more details are needed. Do you want the actuator to stop at 512 for a short time first? Then flip-flopping between the other two values?
Remember to take into account that any actuator will take “time” to go where your program wants it to go to. Also which controller are you using?
You can also see my YouTube video flip-flopping an AX-12 to understand the various issues involved