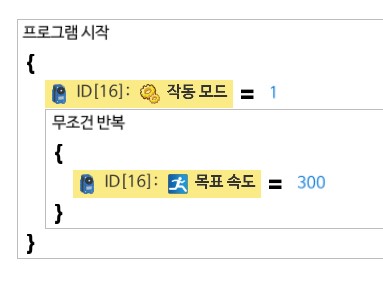
R+TASK3.0에서 XL430W250T 다이나믹셀을 바퀴모드로 사용하고 싶은데…
안되네요.
더 필요한 코드가 있나요?
R+TASK3.0에서 XL430W250T 다이나믹셀을 바퀴모드로 사용하고 싶은데…
안되네요.
더 필요한 코드가 있나요?
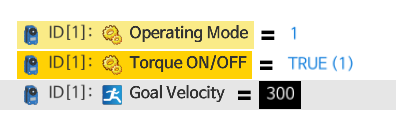
You also need to turn on the servo’s torque before writing the desired goal velocity
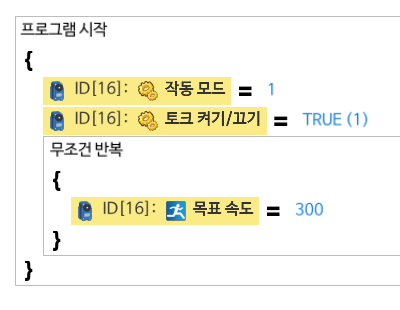
알려주신것처럼 토크ON/OFF를 TRUE로 설정하는 코드를 추가해도 다이나믹셀이 움직이지 않습니다.
테스트하고 있는 다이나믹셀은 TASK3.0 파이썬 모드에서는 바퀴모드로 정상작동합니다.
안녕하세요.
XL430의 기본 Velocity Limit 값은 265 입니다.
하여, 목표 속도(Goal Velocity) 값이 300이 아닌 -265 ~ 265의 값을 넣어야 합니다.
265이상의 값을 사용하시려면 Velocity Limit을 0 ~ 1023 사이 값으로 수정하여 사용하시면 됩니다.
하지만, 265값이 XL430의 최대 속도 이므로 265 이상의 값을 넣으셔도 속도는 똑같습니다.
감사합니다.
Can you please try the code below:
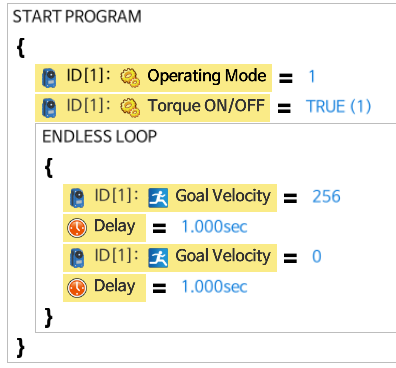
DXL should turn ON for 1 sec, then turn OFF for 1 sec, and so on.
Also which DXL are you using? If you are using XL-330 or XL-430, you also need to check the current value of Velocity Limit (in the EEPROM area - Address 44). If in your program you set Goal Velocity to a number that is higher than the value stored in Velocity Limit, the DXL will simply not turn at all - as this is not allowed by the DXL firmware.