@Kurt, Logic Analyzers are neat. Man, it even shows the Channel 1/2 hex values. Anyway, I have not set up my TX/RX just yet on the scope.
Bear w/ me.
I should have it done this weekend.
Seth
P.S. The U2D2 came in w/ a power adapter. Man, those things are tiny and pricey. Sheesh. Anyway, I will test both things out, e.g. the UART connect on the scope && the U2D2 connection in case my circuit is the pits.
You can see the bottom row where it shows things like it is a ping message.
Again lots of fun. Their newer software has lots of improvements. I personally don’t have a scope, but so far since I am mostly a digital person and not that much with analog, I have not needed one. Also my newer Saleae analyzers do capture Analog as well, although not as fast as it can analog.
Good luck with your circuit and I will try to help as I can. Soon @ROBOTIS-Will and the rest of Robotis should be back from Holiday
@Kurt, it is nice to know that some people are still around to assist with daily activities.
Logic Analyzer. I will have to look into this idea. I have been using this scope for a very brief time. So, there is a learning curve and more ideas to read up on.
Seth
P.S. I think both of my GPIO scope readings were bogus. I got some info. from #beagle on Freenode. I think I have to set my scope to 1v/div. So, this way, things should just be done and transparent. I still have not gotten the RX/TX completed. So, this test will take me some time. Like everyone, I have tons of projects at this time.
The Logic Analyzer would be the best, but I also haven’t had chance to use it yet.
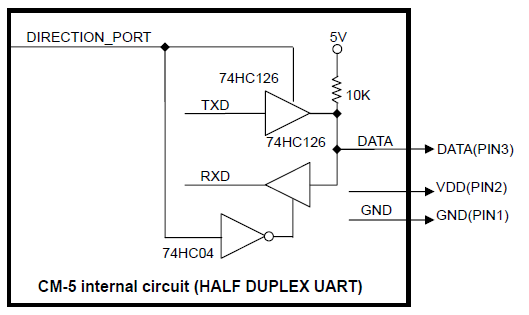
Please let me know when you get a correct reading from the Direction_port and Data bus pins.
I’d expect to see both of them in a single screen so that direction is being switched with TX and RX on the Data bus.
Good luck with your projects!
Hello Again. Sheesh. This is a long, hectic move. So, I just read on the github.com issue tracker that I listed on your github.com repository that installed firmware accounts for 1,000,000 bps and not 9600 bps like I have listed in my source.
I will try to update the source, rearrange some items to get to my servos, boards, and electronics, and then return service.
Seth
P.S. I had changed the source to fit my needs instead of understanding what exactly was already done in the firmware on these AX-12A servos.
I am messing w/ the U2D2 right now. I have not had time to test with the old schematic but I will keep you informed when I attempt it again. I got the Wizard source to acknowledge the AX-12A. Things seem okay. I am going to attach the AX-12A to the BBBW and see what happens. I will keep you updated.
Okay. Just like you knew, I finally got the linux_sbc to work with all of the source in tests, e.g. ping.py, ping.c, and etc.
Um…now about the programming of some source from the SDK. Is there any ideas circulating to get started with the SDK for Linux_SBCs?
Seth
P.S. I mean, I know a little but I do not know everything. And just for reference to anyone who reads this post, use 1000000 baud rate in the source for the SDK for the AX-12A servos.
@silver2row
Glad to hear that it is now working!
Have you made a lot of modification on DYNAMIXEL SDK?
If you want to share your progress, please feel free to post your project under Robot Project category.
Sure…the examples I am using are from the SDK tests portion of source. I can show someone that I changed the required fields for the AX-12A servos from what the MX styled servos in the examples showed.
I will post in the robot project category soon.
Seth
P.S. I may get back to testing w/ the circuit you showed me but I want to play some w/ the servos first.
I made a post on Hackster.io a while back and I thought I would show my findings on the Robot Project category like you wanted. Anyway, it is a w-i-p and I will get back to it for the long haul soon.
@silver2row
Thank you for the updates.
I’m also working on a simple example of running DYNAMIXEL with Raspberry Pi, but it will be based on off the shelf products so your development history is worth to developers who would willing to create their own application.
Please let me know if you need any technical support from us.
Thank you.