Use the following template to help create your post:
-
What model of servo are you using?
MX-106
-
Describe your control environment. This includes the controller or interface, and any power source.
torque controller/current controller DC adapter 12V %Ah -
Specify the operating mode for applicable models, and any firmware settings you are using.
-
Include pictures if possible.
-
Include a full description of the issue.
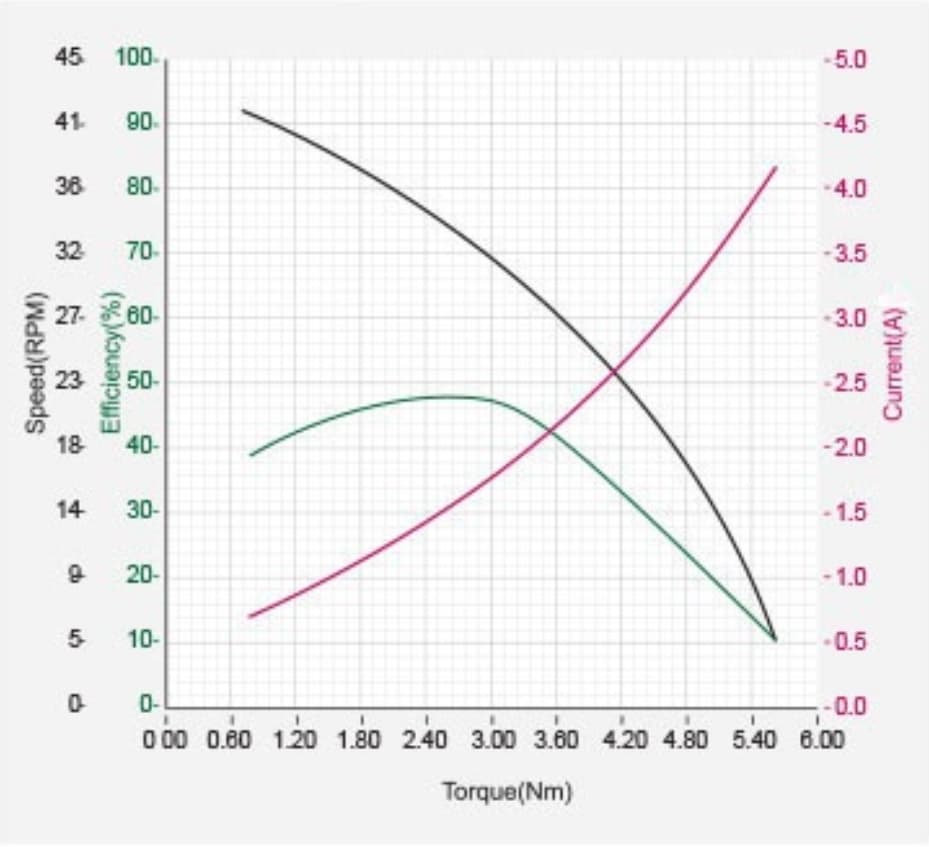
have some questions related to the maximum torque that this motor is available to generate. In the Motor description is provided a picture that describes the torque vs current function of this motor. In this sense, is possible to estimate values of stall torque using the current value (stall current). However, I tested the function to validate the stall torque using the estimated current value using the hall sensor located in the dynamixel motor. according with the motor characteristics, the stall torque one value close to 8.4 [N.m] (at 12[V], 5.2 [A])). But I try to estimate this value using the torque vs current function (replacing 5.2 Ah in the function) and I obtain a torque near to T = 3.6285 Nm, I am using this information to develop a torque control.
thank you very much