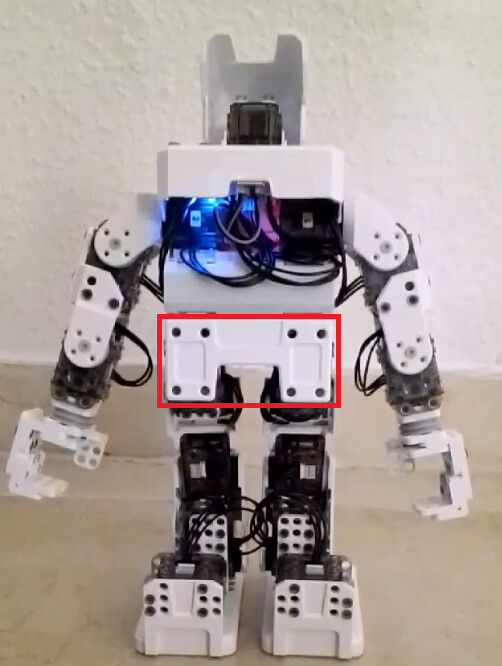
I assembled it gradually, working on it bit by bit each day. However the robot is unstable, and most of the tricks are not working. The “Actuator Test” appears to be fine, but sometimes the robot collapses during quick forward movement and when stopping.
This issue is particularly evident with the “GetUp” function, where the robot tries to stand up but fails to do so. I am fairly confident that the problem lies on my end, but I couldn’t identify the error in the assembly. I need guidance on how to fix the assembly without having to disassemble and rebuild the entire robot. This is quite a lengthy process where I might make the same or a different mistake.
I believe that if I provide you with a video showing how the robot behaves, your technicians may be able to identify the issue and guide me. Could you please let me know if this is possible?
Thanks Milos
You can also run the Motion examples with the Mini on its back and on a table top to see if it can go through the Motions properly or not. This is the “no gravity” option just to see if all the Motions are “logically” ok first. Then you can stand it upright and redo the motions to see which parts failed.
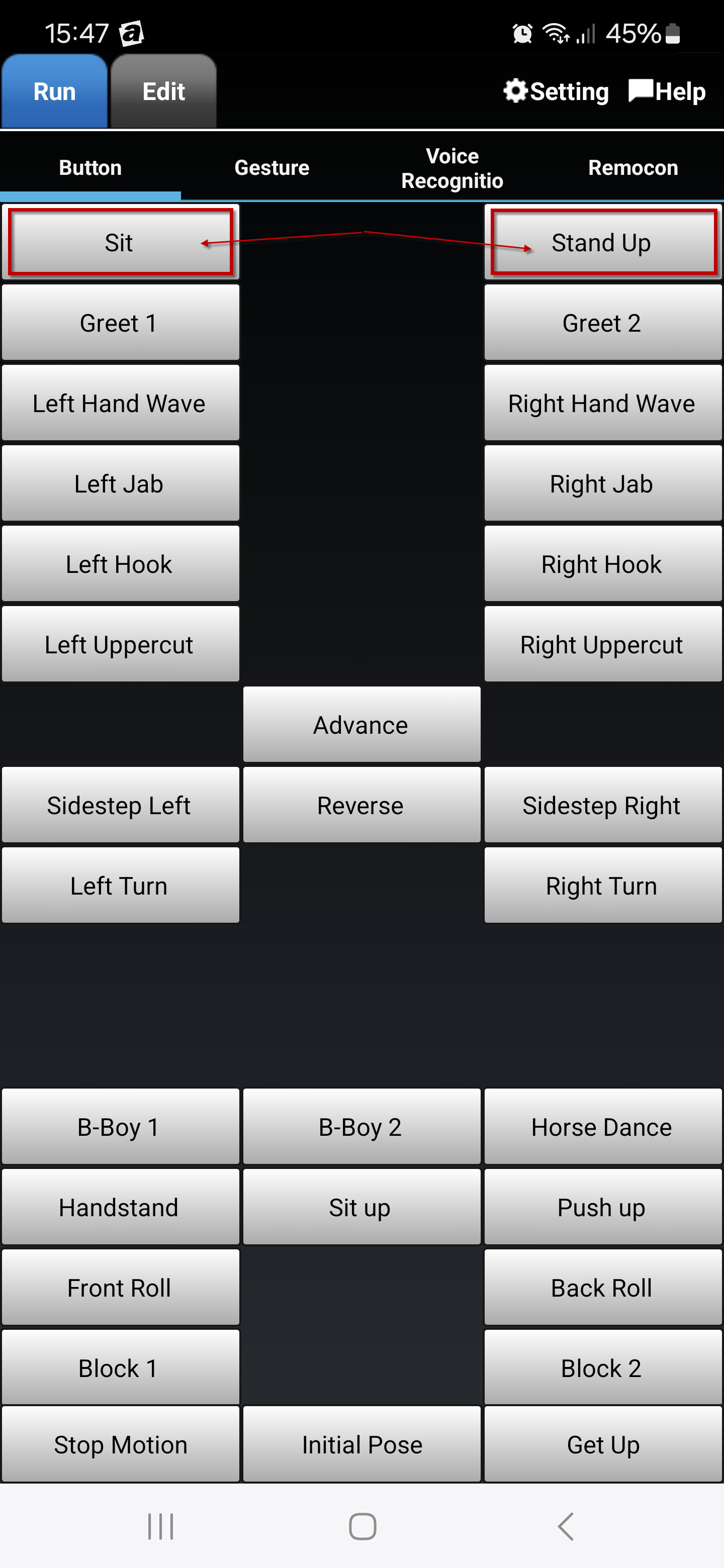
OK, I will start with videos. I used gestures and tricks from Robotis Mini Android application.
First with moves that seem to be OK.
This is Left hand wave and right hand wave from Back:
From what you’ve shown in the attached video, it does look like the base assembly has been completed correctly. It looks like the balance is off though. Adjusting the Motion Offset should make it possible for the robot to complete these motions as expected.
Hello and thank you.
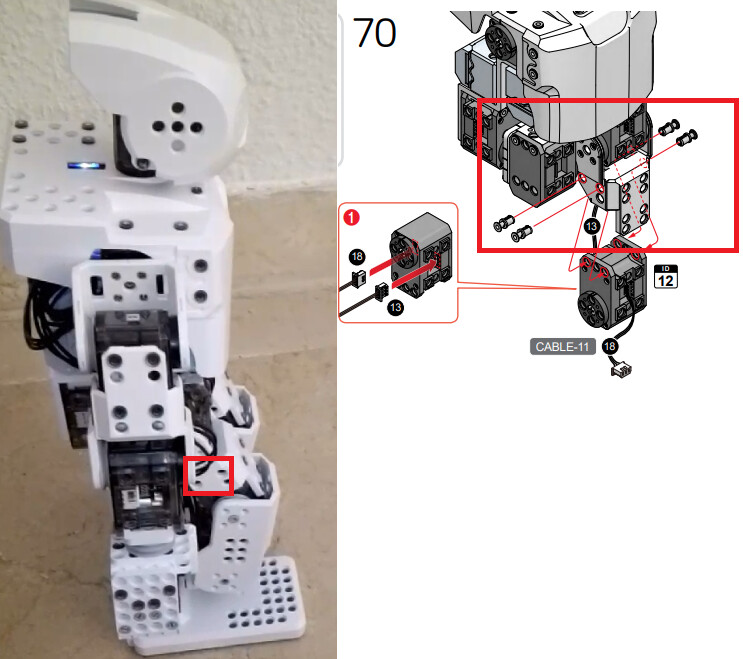
Unfortunately I don’t understand from the pictures where the problem could be. In the meantime I double checked my settings according to https://youtu.be/oW493RqgBtA that I got from your operations specialist and my settings (especially the hip) seem to be fine.
I’m adding more videos that didn’t fit in the previous posts
Get Up:
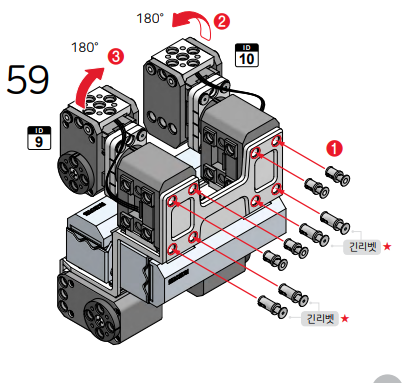
Ah, I understand now, thanks for the explanation. They were indeed missing and I will add them. However, this was not a major problem, because even without these rivets, the relevant parts were firmly connected - these rivets did not affect the bad behavior of the robot.
@ROBOTISUSA and others:
I saw that it is possible to set a “motion offset”, but I did not see a description anywhere how the setting will affect the robot’s movement. Considering that there are 16 Dynamixels, I find it very complicated. I expected that after the correct assembly, the Dynamixels would be in a position that would not require such advanced settings
Have other users/customers also had to perform such actions?