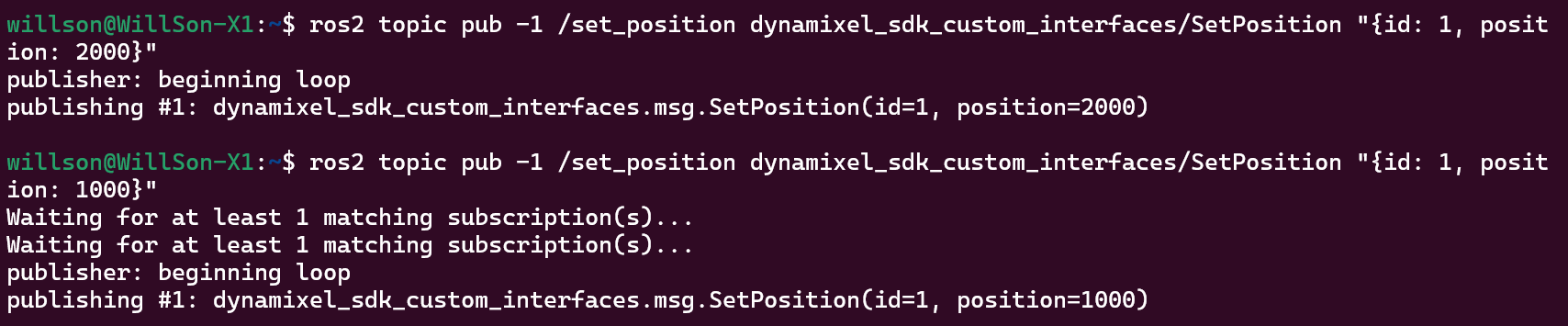
When I tested with my XL430-W250-T (ID=1, Baudrate=57600), this worked fine on ROS2 Humble as below.

If you are getting the missing module error, please make sure that the correct GitHub source code branch(humble-devel) is downloaded and compiled.
This can be checked with the command below under your DynamixelSDK folder
$ cd ~/robotis_ws/src/DynamixelSDK
$ git branch checkout humble-devel
You should see something like this.

Then, the setup.bash must be sourced as below. I had this command in the .bashrc file.
$ source ~/robotis_ws/install/local_setup.bash

this is where I source ROS setup in the .bashrc file.