Hello!
Everything goes right until this command:
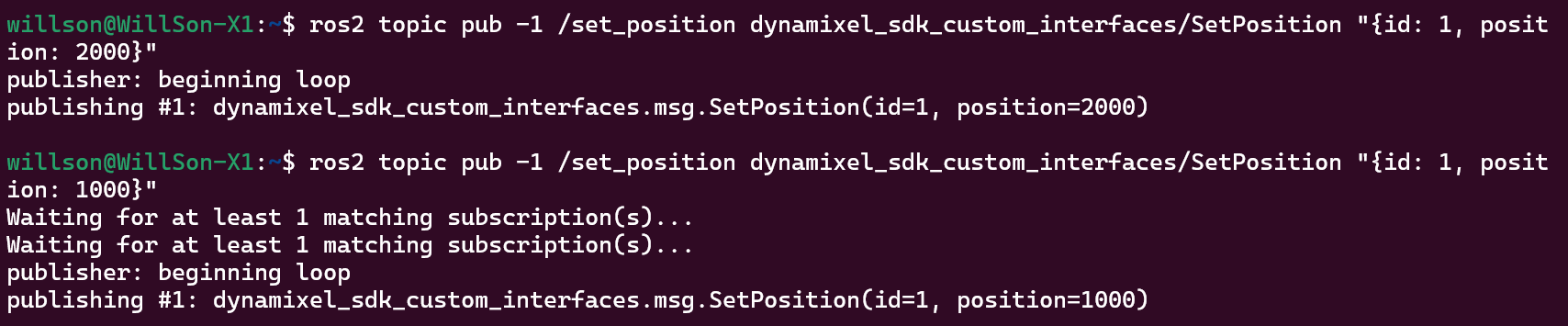
ros2 topic pub /set_position dynamixel_sdk_custom_interfaces/msg/SetPosition
after SetPosition, normally by pressing Tab, It should looks like in the video:
ros2 topic pub /set_position dynamixel_sdk_custom_interfaces/msg/SetPosition "{id: 1, position: 1000}"
but unfortunately, it’s not working!! and typing by myself is not solve the problem.
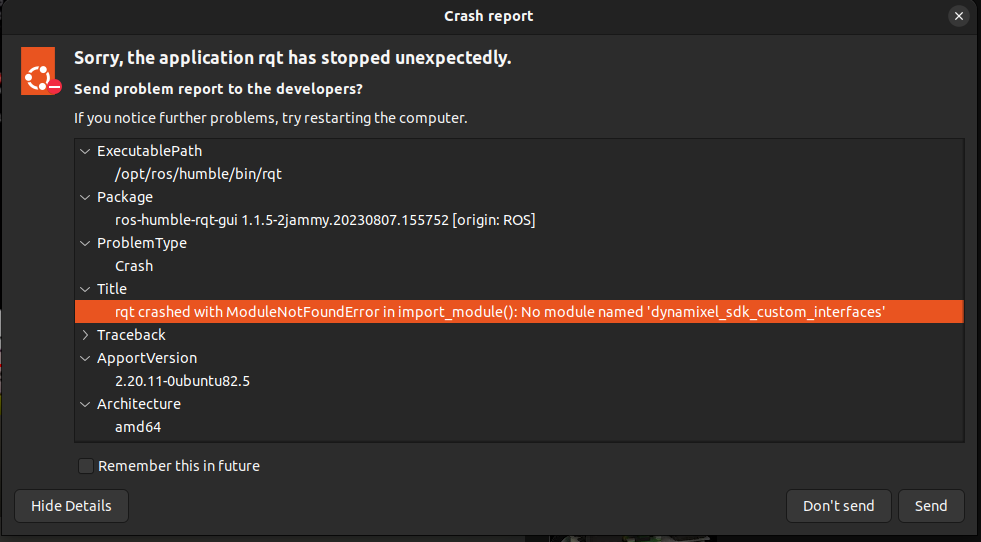
I also tried publishing this topic (set_position) using rqt but when I want to add, it causes crash!
There is “dynamixel_sdk_custom_interfaces” folder:
Please help me.
willson
September 8, 2023, 2:53am
2
Hi @alikhorshidi
I’m sorry about the delayed response.
willson
September 8, 2023, 7:11am
3
@alikhorshidi
When I tested with my XL430-W250-T (ID=1, Baudrate=57600), this worked fine on ROS2 Humble as below.
If you are getting the missing module error, please make sure that the correct GitHub source code branch(humble-devel) is downloaded and compiled.
This can be checked with the command below under your DynamixelSDK folder
$ cd ~/robotis_ws/src/DynamixelSDK
$ git branch checkout humble-devel
You should see something like this.
Then, the setup.bash must be sourced as below. I had this command in the .bashrc file.
$ source ~/robotis_ws/install/local_setup.bash
this is where I source ROS setup in the .bashrc file.