Any idea if or when this board might get support?
Not sure if this will help or not, but on my quick set of searches, there looks like there may be some limited ROS support for ROS Kinetic on RPI4
http://wiki.ros.org/ROSberryPi/Installing%20ROS%20Kinetic%20on%20the%20Raspberry%20Pi
I did try that one, but trying the install did not work and appeared to be put up with zero testing LOL clown’s need to stay in the circus.
It did show me how hot this board gets, with heat sinks even. I am adding a small fan myself.
There is a image out know with Ubuntu 16.04 from Ubiquity which launches a adhoc connection,
It is pretty good. ![]()
@Lloyd
There will be an update in ROBOTIS eManual regarding this, but please DM me if you want to try out the Raspbian image for TurtleBot3 with RPI4.
Thank you.
Sweet! You are really becoming quit the leader in ros research and tools, dang you rock. ![]()
Oh yea! it works, and good too. I shall install in a turtlebot3 today for some real testing . ![]()
1 Like
Nice! Please let me know if there’s any issue with the image.
Yes, I am seeing were you are being like, ham strung by Ubuntu. Who would have thunk ![]()
Hi @Lloyd and @ROBOTIS-Will - Wondering if your support is for ROS and/or ROS2?
I keep meaning to get back to the ROS2 stuff, but keep getting distracted.
Hum, I think will knows way more than I, but personally. It seems there is something very wrong with the Ubuntu development at the moment over at, hum were is it developed at? Cause he/she needs some help! ![]()
@Kurt @Lloyd
Hi, this RPi4 image is for ROS 1.
ROS 2 Dashing is currently tested with Ubuntu server 18.04 image, but we cannot distribute our own image due to the limitation of redistribution policy of Canonical.
So until we develop Raspbian image for ROS 2, installation procedure on eManual will be updated with Foxy version.
There is now a install for ubuntu-mate-desktop for the Ubuntu server 18.04 image, just suo apt-get install form the command line. ![]()
What does the gravity compensation package with OpenManipulator-X do? ![]()
I should have mentioned this, the image you sent me is working really well after this last bunch of updates. I really think this Raspberry pi 4 with 4GB is the sweet spot for the TB3’s. The 8GB is actually not beneficial or at least I can not detect a difference, so that is my feed back.
Sorry about the delayed response.
The gravity compensation controller package is an example that use effort joint interface to stay at the present pose while being able to respond and change the pose with an external force. This feature use current feedback from DYNAMIXEL.
Thank you for your feedback about the RPi4 image.
I think I received good amount of feedback for updating the manual!
Hi @ROBOTIS-Will, I am trying to use Raspberry Pi 4 with TB3 too, where can I download the image file of ROS for Raspberry Pi 4?
@Robotclub
Hi, you can download the Raspbian image with ROS1 Kinetic Melodic for Raspberry Pi 4 from the link below.
Please let us know if there’s any issue with this beta image.
Thank you.
https://www.robotis.com/service/download.php?no=1905
===Edited===
Please be aware that the image above is ROS1 Melodic for Raspberry Pi 4 2GB/4GB.
Although this image may somewhat work well with remote PC with Kinetic, the compatibility between two different ROS distros is not guaranteed.
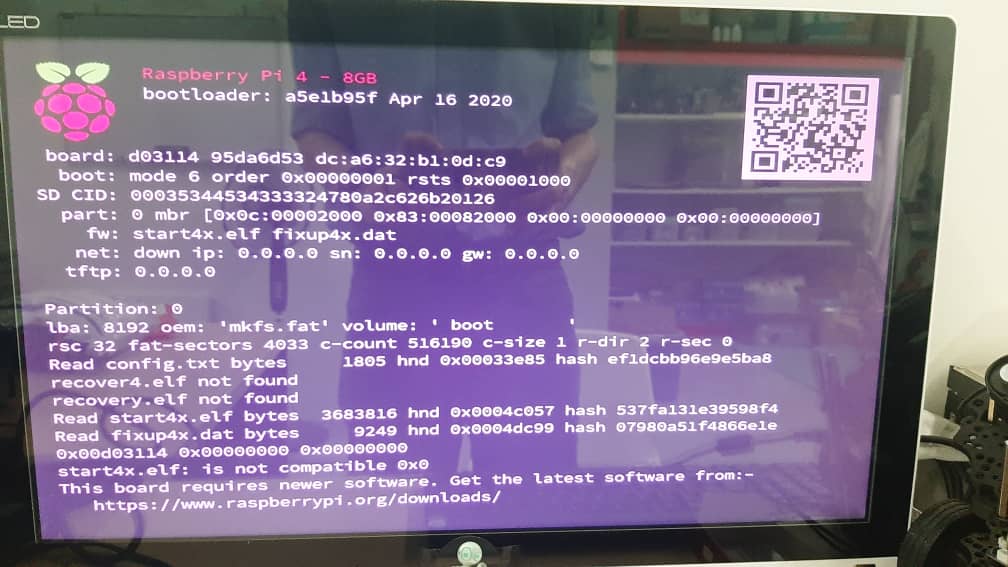
@ROBOTIS-Will, thank you for your image file, but it is not bootable in Raspberry Pi 4 Model B 8GB RAM.
The screen just showed: