I am trying to establish serial communication with these products. I am running tests with the examples provided for LabVIEW (labVIEW 2011).
The problem is that if I want to direct 2 motors and read their data, I cannot receive data exchange at the frequency I want in data communication.
If communication can be established faster, what is the way?
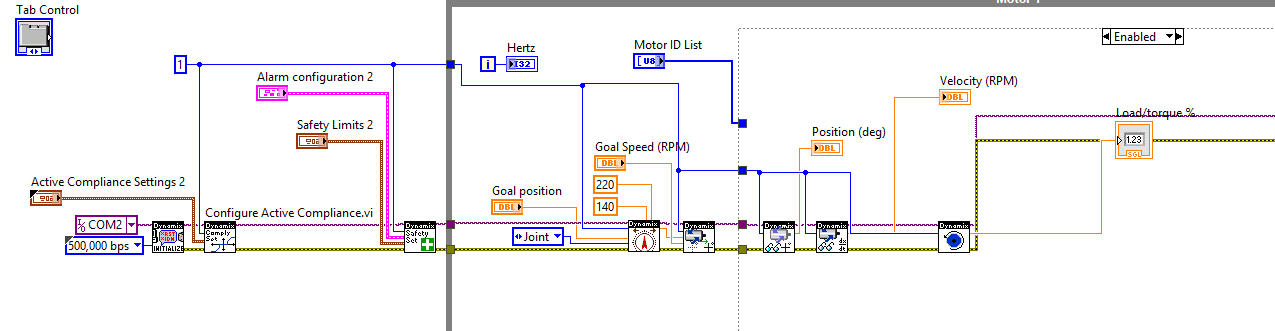
I’m reading the position,speed,load information with the SubVIs provided here. This way I get a much slower refresh rate.
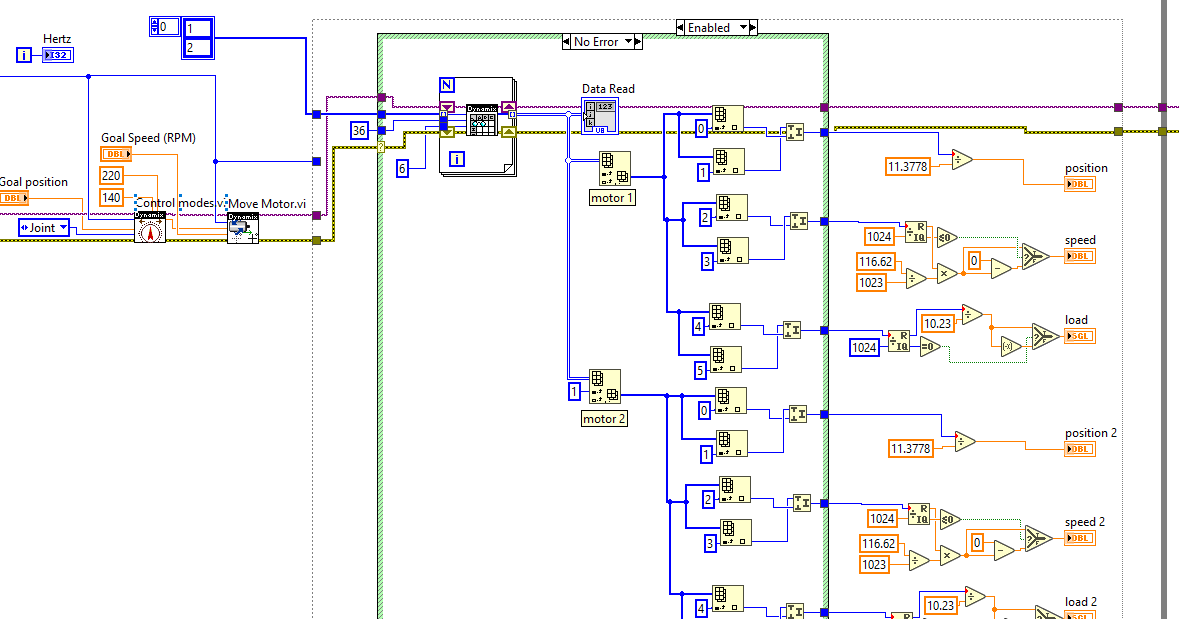
I’m telling it to read the same information in the 2 IDs provided here, and I’m reading the position,speed,load information. This way I get a little more refresh rate.
But it is still not fast enough. My goal is to achieve 400 Hz communication speed with both control and information reading in both servos.
I can communicate at a maximum rate of 70Hz. How fast can I communicate with 2 motors?
Every opinion given is worthy of respect.
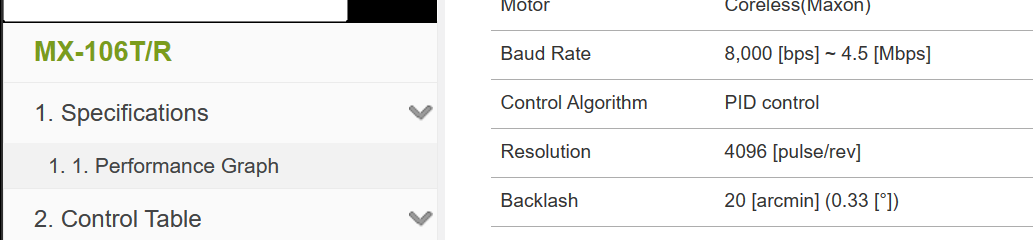
I don’t use LabView, so this is only a general recommendation. If the project is in Arduino, then I would set the DXLs Baud Rate as high as possible (i.e. 4.5 Mbps) - see info from Robotis e-manual below:
Then use Sync Read Write to control and access data from the DXLs. There is also Fast Read but so far I could not make Fast Read to work for me in Arduino.
You may get more than 70 Hz then, may be 100 Hz but 400 Hz is way too high for these DXLs, I think. From my experiences in using Sync Write Read to 4 DXLS set to 1 Mbps, I got only about 64 Hz per set of Write-Read with an ESP32 S3 (@ 240 Mhz) - see actual data shown in this post:
Thanks for your ideas. I would choose 4.5 Mbps if I could. But there is a problem, I think 4.5 is only for protocol 2.
Another case is I don’t use Arduino. I use myRIO and it can be programmed with labview.
So far, I have been able to achieve 260 Hz with 1 million baud rate on the computer.But I want to use over myRIO.But I can’t use it on myrio. Because the maximum baud rate of ‘‘921600’’ can be selected in myrio and if I choose this baud rate in myRIO, I cannot control the motor at the desired angles because the commands sent are missing or wrong.
I guess I can’t set 921600 baud rate for Dynamixel motor.
I don’t know if there is a solution to this.
Sounds like your MyRio is the issue then not the U2D2 nor the DXLs. Can you upgrade your MyRio with a faster communication module? Or ask the NI forum instead?