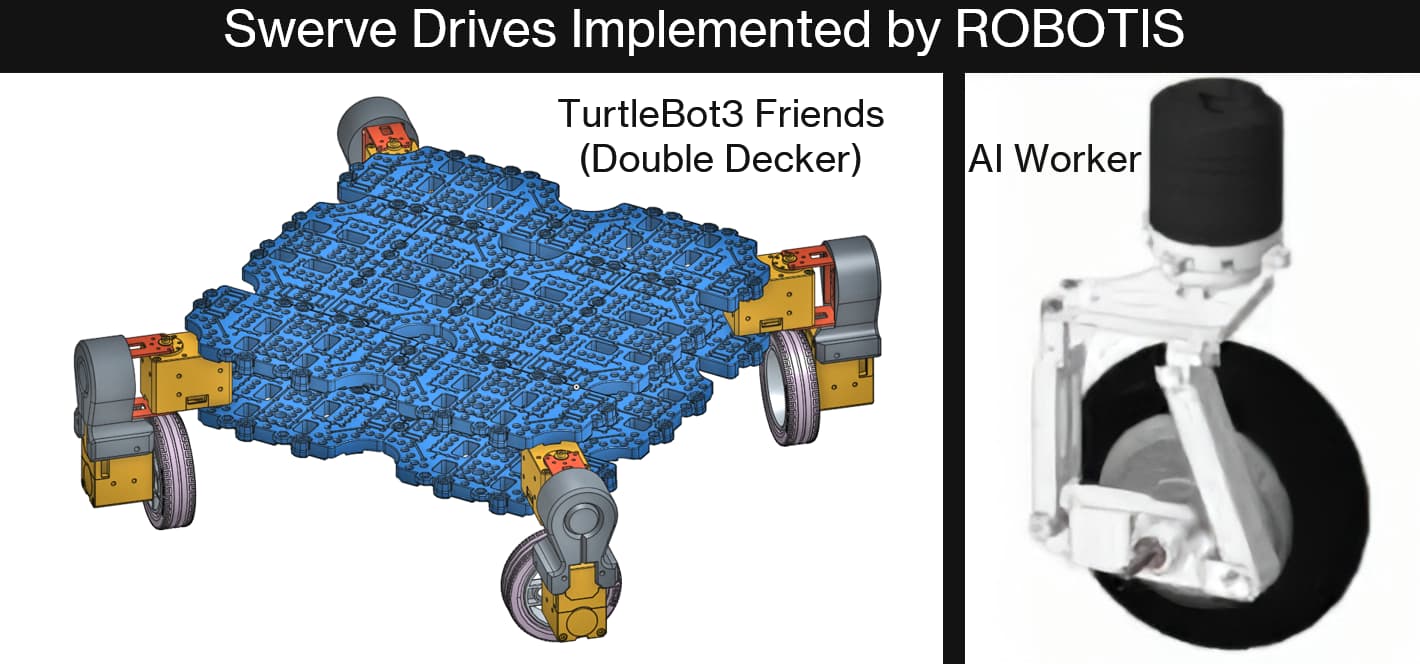
I have always wanted to use a Swerve Drive for my Engineer-kit based robots (using XL-430s), as previously implemented by ROBOTIS for the Turtle Bot 3 (TB3) and more recently for the AI Worker:
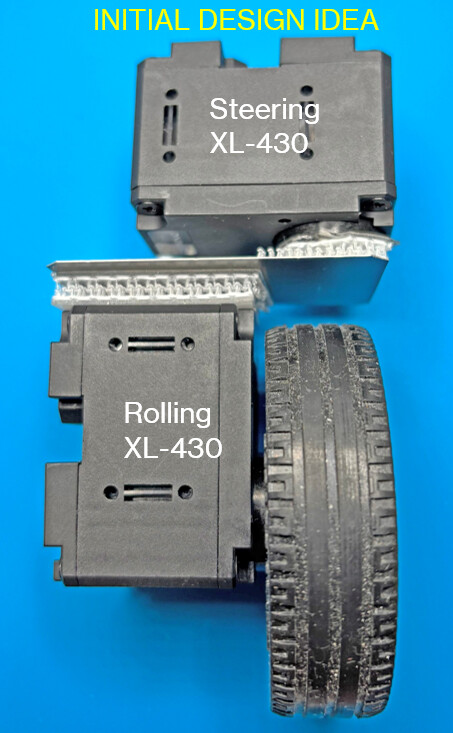
And with the recent price reduction for the XL-430s, that option is getting more affordable for me. So first, I thought of the simplest design possible which is shown below (using aluminum roof flashing and 3M Dual-Lock tape ![]() ).
).
However I do not have access to any 3-D Design & Printing services, so I approached ROBOTIS USA to see if they are interested in providing such frame parts to the users from now on. And thankfully their answer was yes. So Mason from the CA office and I went through several design iterations and we came up with 2 types of SWERVE CONNECTORs: Type I and Type T.
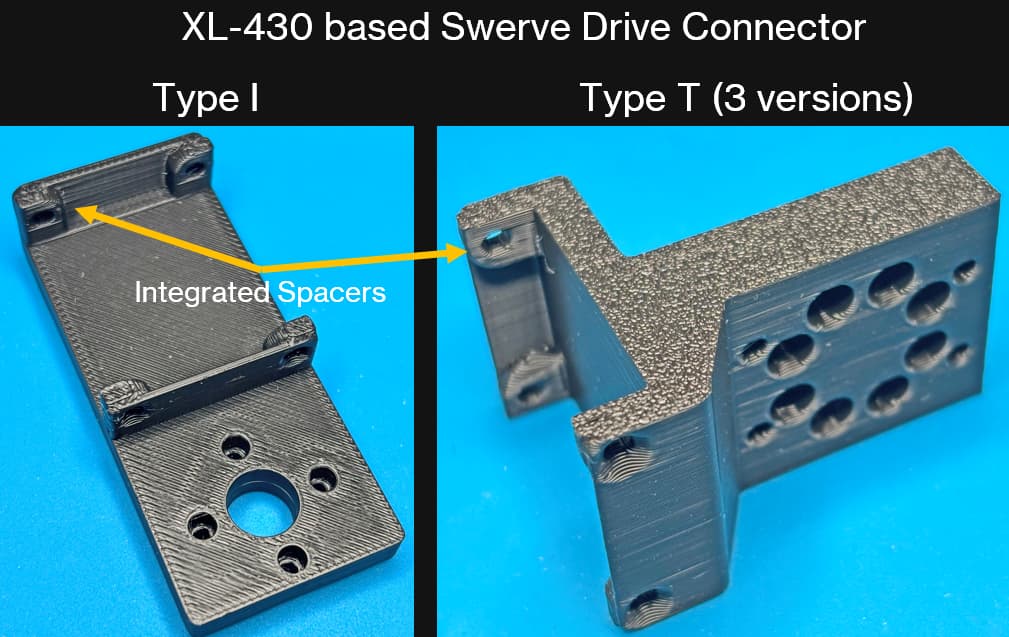
Type T itself even has 3 versions:
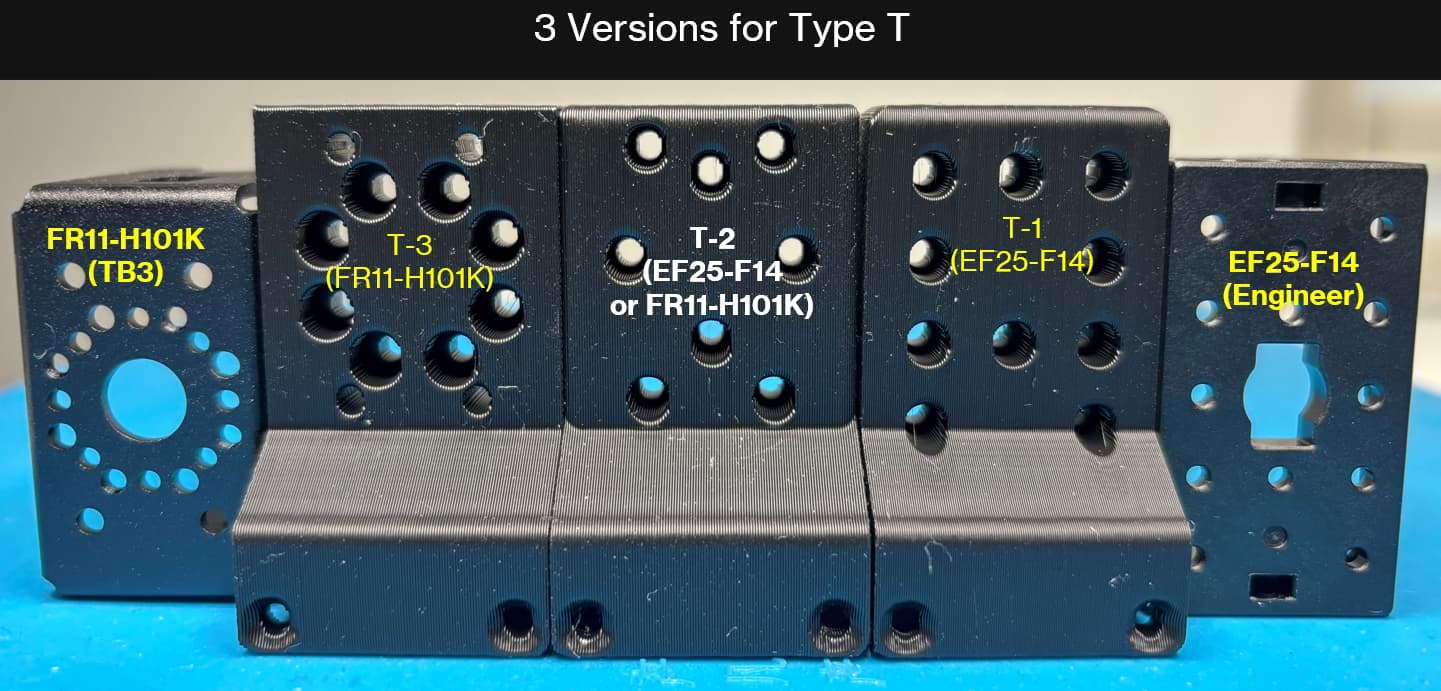
- T-1 is to be used ONLY with Frame Part EF25-F14 (which is included in the ENGINEER Kit 1).
- T-3 is to be used ONLY with Frame Part FR11-H101K (which is from the TB3 collection).
- While T-2 is the “convertible” one, it can be used with either Frame Parts EF25-F14 or FR11-H101K.
If the Type I Connector is adopted for Low Payload cases, we can mount the Swerve Drives in High or Low Clearance configuration. The Low Clearance option has a more restricted steering range:
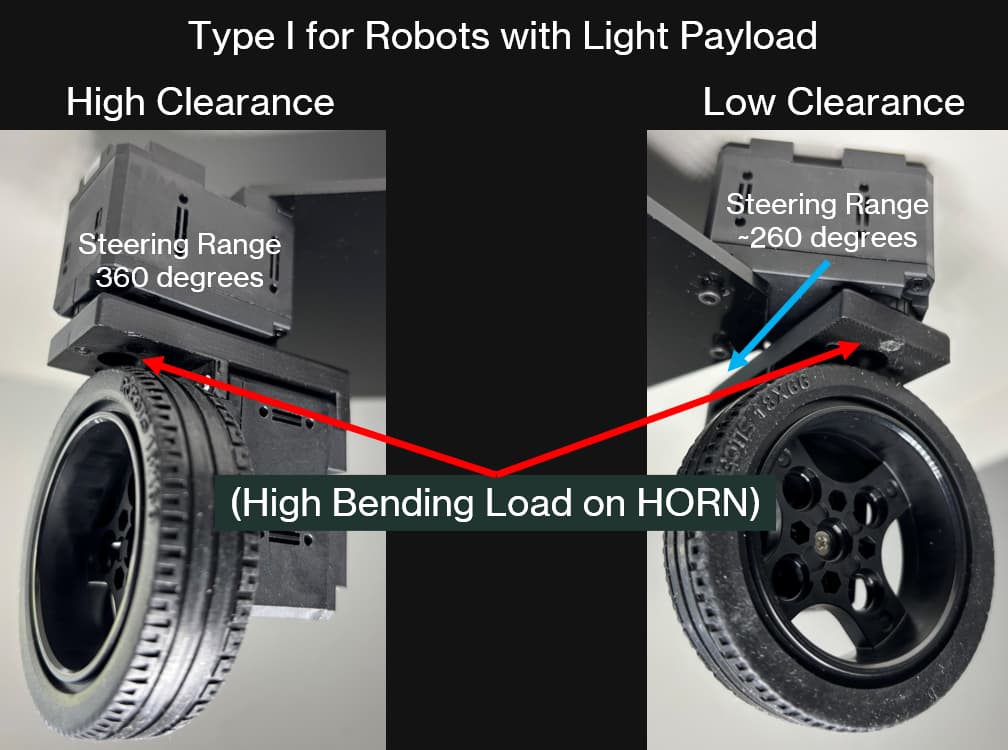
The potential “mechanical” issue with this design is the Bending Load on the Horn, supported by only 4 M2 screws!
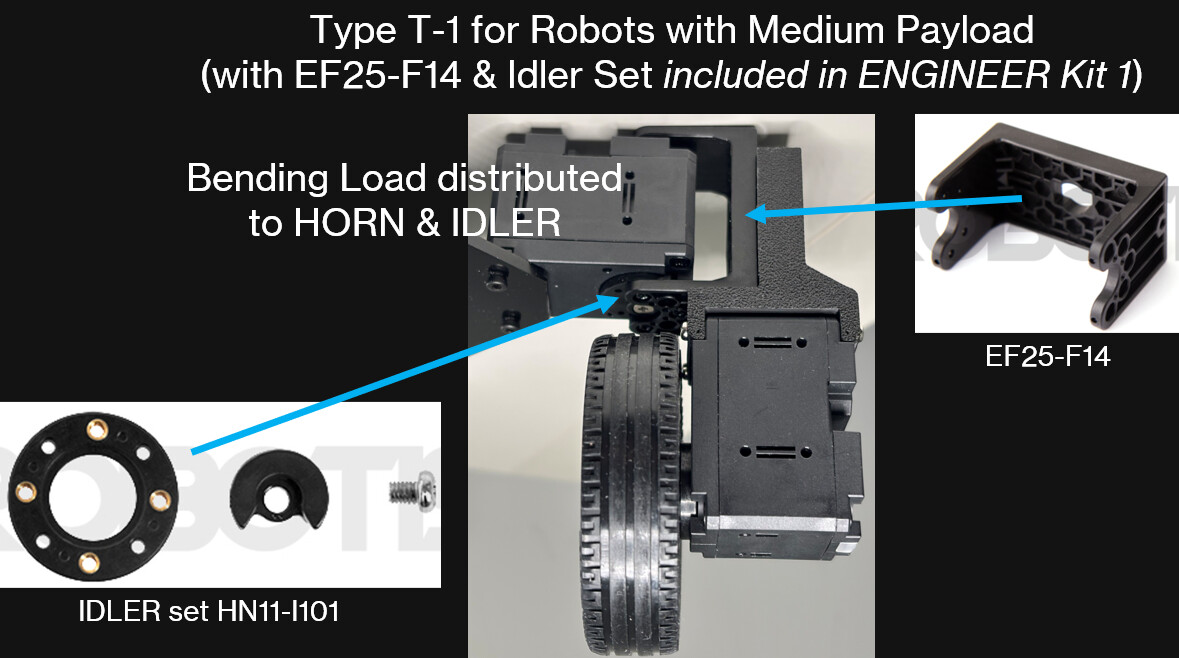
If the Type T-1 Connector is adopted, we can also mount the Swerve Drives in High or Low Clearance configurations, and both options have a more restricted steering range as compared to Type I. However the Bending Load is now distributed to both Horn and Idler of the servo (more suitable to Medium Payload situations because the EF25-F14 is made of engineering plastic).
Lastly, the Type T-3 Connector can be used with Part FR11-H101K which is made of Aluminum Sheet so this option is chosen when a heavy load is required.
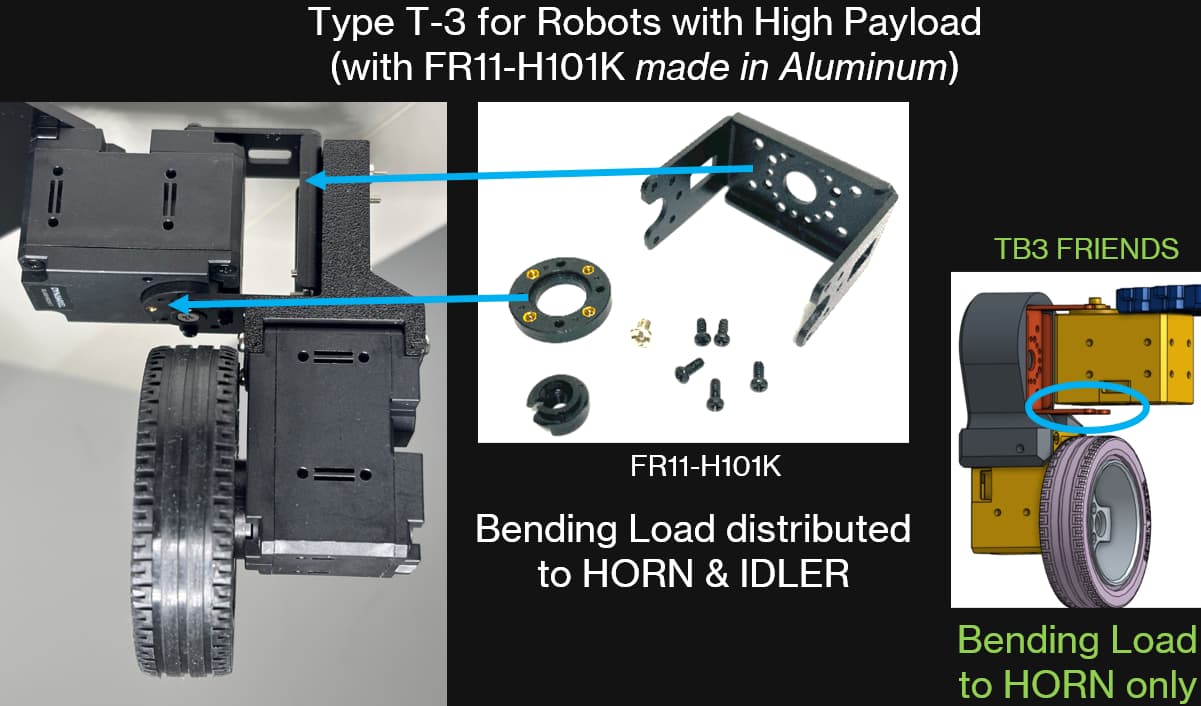
In this TB3 video, a 4-wheel Swerve Platform was shown carrying 30 Kg of rice bags!
Next, let’s discuss some options for the robot’s platform per se:
- The “easiest” option is to get the ROBOTIS Waffle Plates that were made for the TB3 series. You will be restricted to a Square of 6x6 inches or 12x12 inches. The “LeKiwi” folks 3-D printed a special triangular center piece that can be used with 3 Waffle Plates to make an “equilateral” platform which can then configured as a 3-Wheel Swerve Drive platform also.
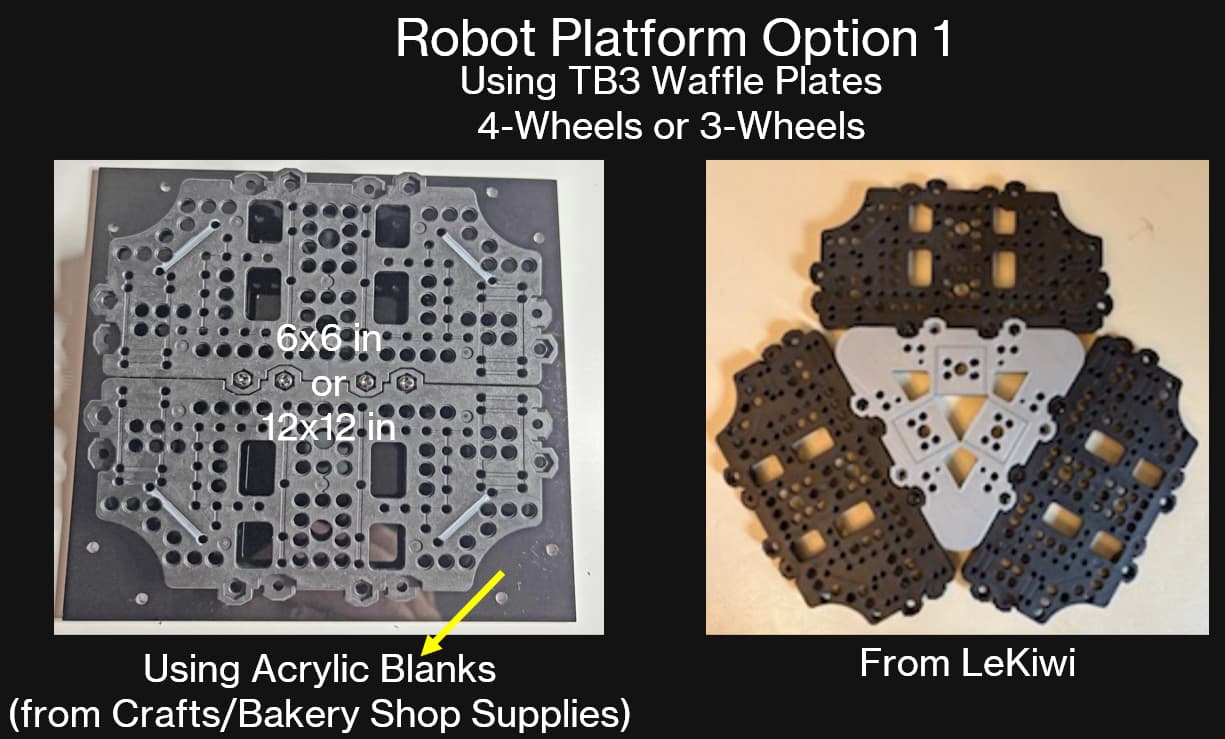
If a DYI user requires a different size for his/her robot platform then Acrylic Blanks from Craft or Bakery-Shop Supplies stores can be purchased and mounting holes can be drilled as needed.
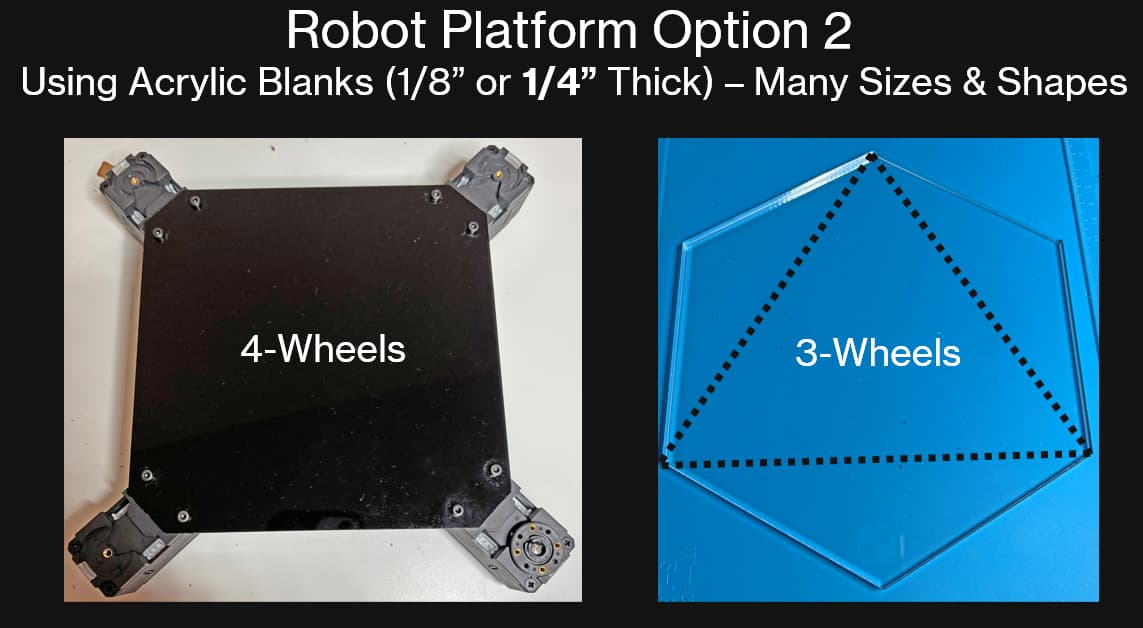
For some reasons, an “equilateral-triangle” shaped blank is not available anywhere! However, hexagonal blanks are available, and an equilateral triangle can be found “hidden” inside an hexagon (from middle-school geometry).
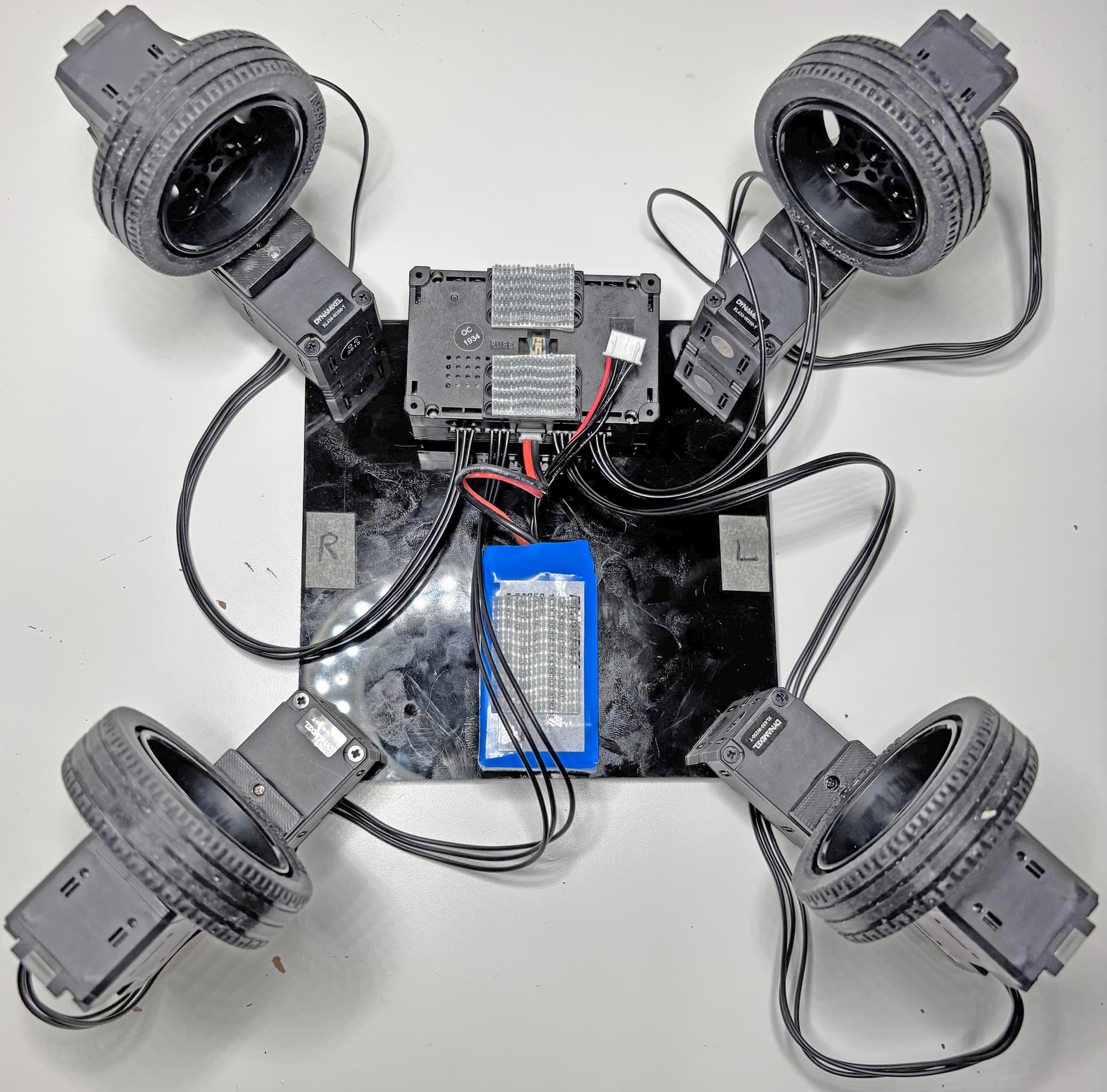
Lastly, the author made a demo 4-Wheel platform using a 6x6 in. blank (1/8" thick) and statically it can support 10 lbs (although he has not tested to see how fast this demo platform can roll yet).
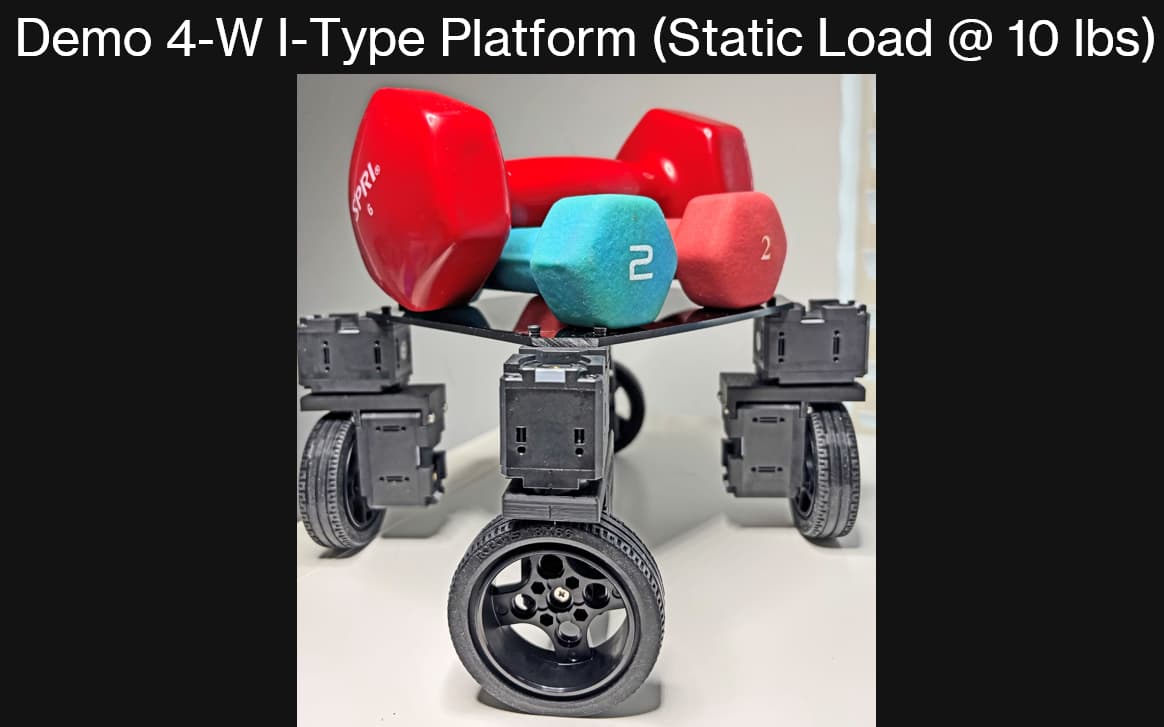
So Type I is “stronger” than it looks! Enclosed are the STL files
Type-T-3.stl (442.0 KB)
Type-T-2.stl (292.3 KB)
Type-I.stl (260.6 KB)
Type-T-1.stl (309.7 KB)