안녕하세요!
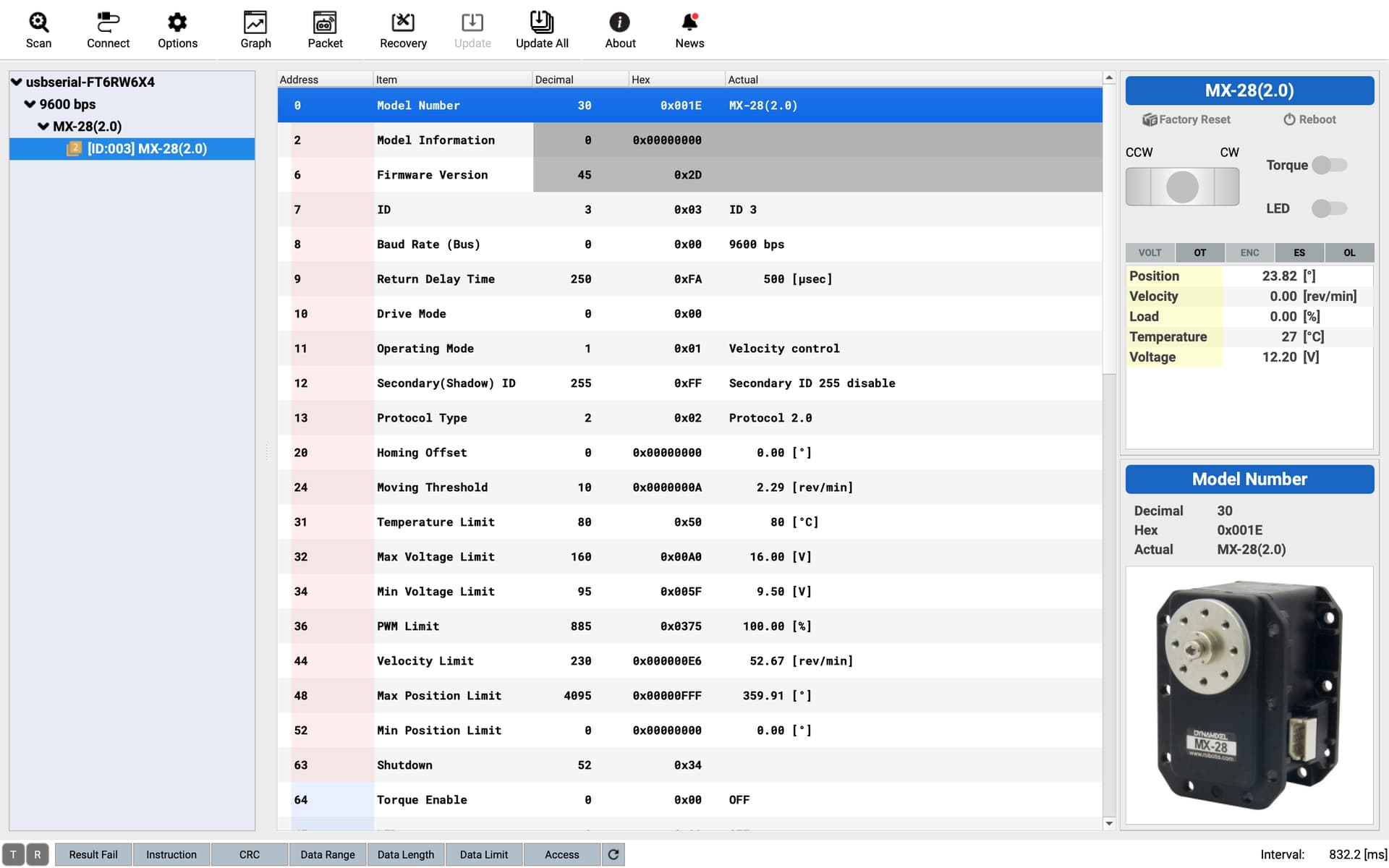
현재 다이나믹셀 mx-28 모델 사용하고 있습니다. 모터를 아두이노 우노에 다이나믹셀 쉴드를 달아서 제어를 시도하고 있습니다. 다이나믹셀 위자드로 확인을 해보니 프로토콜 버전이 1.0이라서 펌웨어 복구를 통해 2.0으로 변경을 시도했습니다. 그 후 아래 코드를 이용해보니 모터가 돌아가지 않더라구요! 그리고 또 다이나믹셀 라이브러리를 이용해서 velocity_mode 예제를 돌려보는데 그 것도 잘 안 되더라구요. 다른 예저인 operating mode나 ping모드는 잘 돌아가고요. dxl.setGoalVelocity로 하는게 안 되는 건지 펌 복구가 이상하게 돼서 이런 오작동이 일어나는 건지 궁금해서 문의해봅니다!
전체 코드는 아래에 첨부해보겠습니다! 감사합니다!
#include <Dynamixel2Arduino.h>
#include <DynamixelShield.h>
#if defined(ARDUINO_AVR_UNO) || defined(ARDUINO_AVR_MEGA2560)
#include <SoftwareSerial.h>
SoftwareSerial soft_serial(7, 8); // DYNAMIXELShield UART RX/TX
#define DEBUG_SERIAL soft_serial
#elif defined(ARDUINO_SAM_DUE) || defined(ARDUINO_SAM_ZERO)
#define DEBUG_SERIAL SerialUSB
#else
#define DEBUG_SERIAL Serial
#endif
const uint8_t DXL_ID = 3;
const float DXL_PROTOCOL_VERSION = 2.0;
DynamixelShield dxl;
//Dynamixel2Arduino dxl(DXL_SERIAL, DXL_DIR_PIN);
//This namespace is required to use Control table item names
using namespace ControlTableItem;
float distance_to_time = 60.0 / (22.9 * 2 * PI * 10); // Update: Add decimal point to ensure correct float division
void setup() {
DEBUG_SERIAL.begin(9600);
dxl.begin(9600);
while (!DEBUG_SERIAL);
// Set Port Protocol Version.
dxl.setPortProtocolVersion(DXL_PROTOCOL_VERSION);
// Get DYNAMIXEL information
dxl.ping(DXL_ID);
// Turn off torque when configuring items in EEPROM area
dxl.torqueOff(DXL_ID);
dxl.setOperatingMode(DXL_ID, OP_VELOCITY);
dxl.torqueOn(DXL_ID);
}
void loop() {
if (DEBUG_SERIAL.available()) { // Read the desired duration from the serial monitor
String mess = DEBUG_SERIAL.readStringUntil('.');
DEBUG_SERIAL.print("Input values: ");
DEBUG_SERIAL.println(mess);
delay(10);
int moving_distance1 = mess.toInt();
DEBUG_SERIAL.print("Moving distance 1 (mm) = ");
DEBUG_SERIAL.println(moving_distance1);
if (moving_distance1 > 0) {
float time1 = moving_distance1 * 1000.0 * distance_to_time;
DEBUG_SERIAL.print("Motor 1 expected rotation time: ");
DEBUG_SERIAL.print(time1);
DEBUG_SERIAL.println(" milliseconds");
unsigned long startTime1 = millis();
while (millis() - startTime1 < time1) {
dxl.setGoalVelocity(DXL_ID, 300);
delay(1); // Update: Add small delay for motor control
}
DEBUG_SERIAL.print("Motor 1 rotation time: ");
DEBUG_SERIAL.print(millis() - startTime1);
DEBUG_SERIAL.println(" milliseconds");
dxl.setGoalVelocity(DXL_ID, 0);
delay(1);
}
else if (moving_distance1 < 0) {
float time2 = (-1) * moving_distance1 * 1000.0 * distance_to_time;
DEBUG_SERIAL.print("Motor 1 expected rotation time: ");
DEBUG_SERIAL.print(time2);
DEBUG_SERIAL.println(" milliseconds");
unsigned long startTime2 = millis();
while (millis() - startTime2 < time2) {
dxl.setGoalVelocity(DXL_ID, -100);
delay(1);
}
DEBUG_SERIAL.print("Motor 1 rotation time: ");
DEBUG_SERIAL.print(millis() - startTime2);
DEBUG_SERIAL.println(" milliseconds.");
dxl.setGoalVelocity(DXL_ID, 0);
delay(1);
}
else {
dxl.setGoalVelocity(DXL_ID, 0);
DEBUG_SERIAL.println("Motor 1 did not rotate.");
}
}
}