안녕하세요..
터틀봇3 burger를 테스트중 odom의 orientation이 변화하지 않아 문의드립니다.
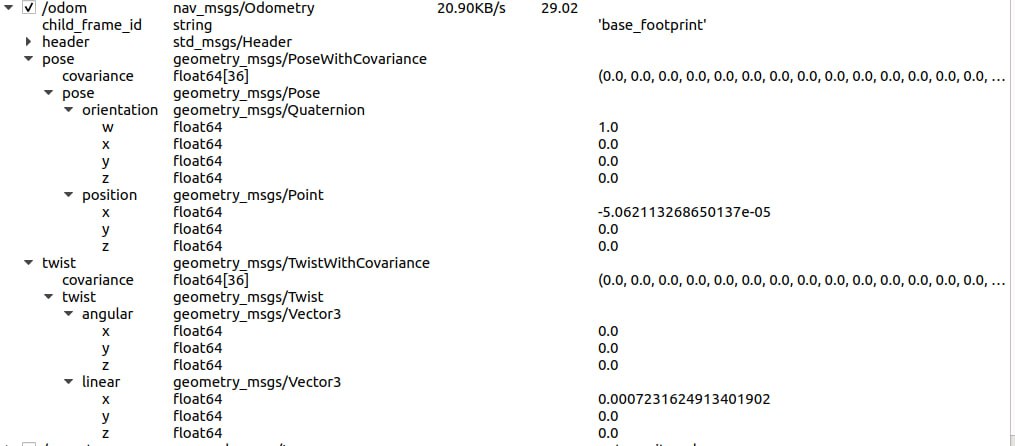
teleop를 사용하여 실제로 로봇을 회전 시켰지만 odom의 orientation은 첨부파일과 같이 변화가 없습니다.
melodic 버전을 사용중이며, OpenCR을 최신버전으로 업그레이드 해 보았지만 증상은 해결되지 않습니다.
참고로 position x,y값은 로봇 이동에 따라 잘 변화합니다..
안녕하세요.
먼저, 로봇이 회전해도 odom의 orientation 값이 변경되지 않는다면, 문제가 있는 것입니다. 이 문제를 해결하기 위해 아래와 같은 몇 가지 가능한 원인과 해결책을 제시해 드립니다.
- 로봇의 회전 센서가 문제가 있는 경우: 로봇 모델에 회전 센서가 장착되어 있어야 하며, 회전 센서가 올바르게 작동해야 합니다. 회전 센서가 작동하지 않는 경우, 로봇이 회전한 것을 감지하지 못해 odom의 orientation 값이 변경되지 않을 수 있습니다. 이 경우, 회전 센서를 다시 확인해 보시기 바랍니다.
- 로봇 모델의 URDF 파일에 오류가 있는 경우: 로봇 모델의 URDF 파일에 오류가 있으면, 로봇 모델이 제대로 동작하지 않을 수 있습니다. 이 경우, URDF 파일을 다시 확인하고 오류를 수정해야 합니다.
- 오도메트리 관련 코드에 오류가 있는 경우: 로봇의 움직임을 추적하는 오도메트리 관련 코드에 오류가 있을 수 있습니다. 이 경우, 코드를 다시 확인하고 문제를 해결해야 합니다.
- 오도메트리 파라미터가 잘못 설정된 경우: 로봇의 움직임을 추적하는 데 사용되는 오도메트리 파라미터가 올바르게 설정되어 있지 않으면, 로봇이 회전하더라도 odom의 orientation 값이 변경되지 않을 수 있습니다. 이 경우, 오도메트리 파라미터를 다시 확인하고 수정해야 합니다.
위의 문제를 해결하는 것이 어려울 경우, turtlebot3의 ROS 패키지와 관련된 커뮤니티나 지원 그룹에서 도움을 받을 수 있습니다. ROS Answers나 ROS Discourse와 같은 온라인 커뮤니티를 통해 다른 사용자들과 질문을 공유하고 답변을 얻을 수 있습니다.