Issue:
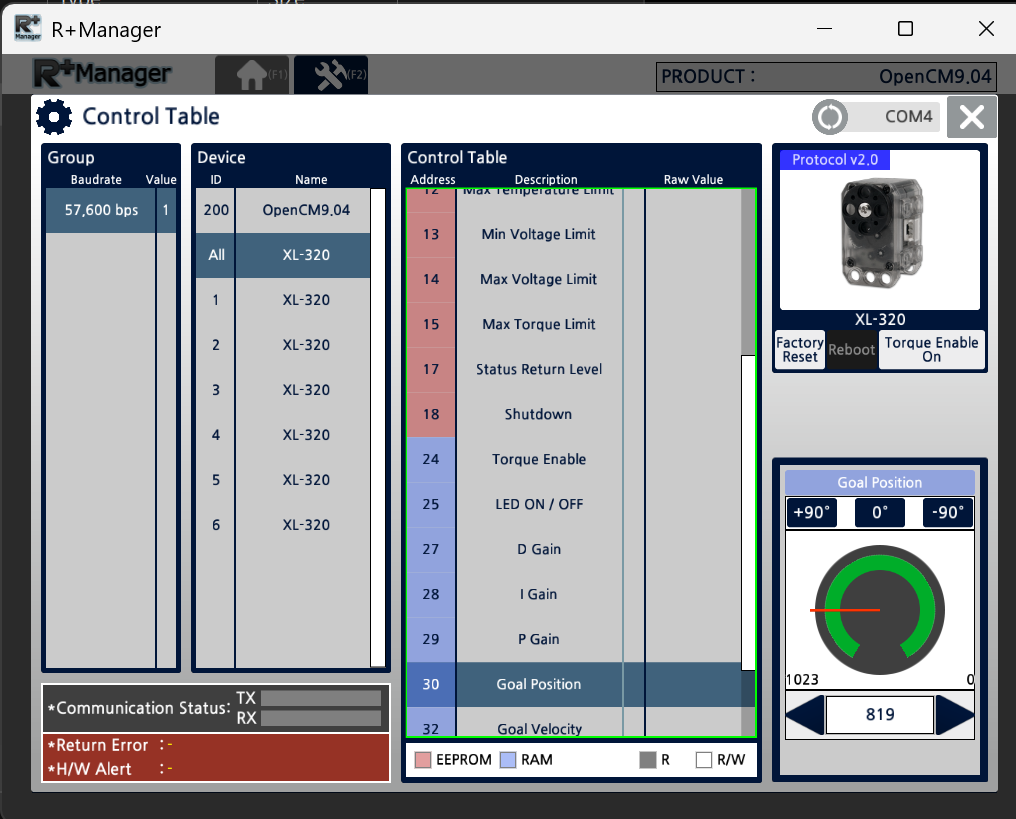
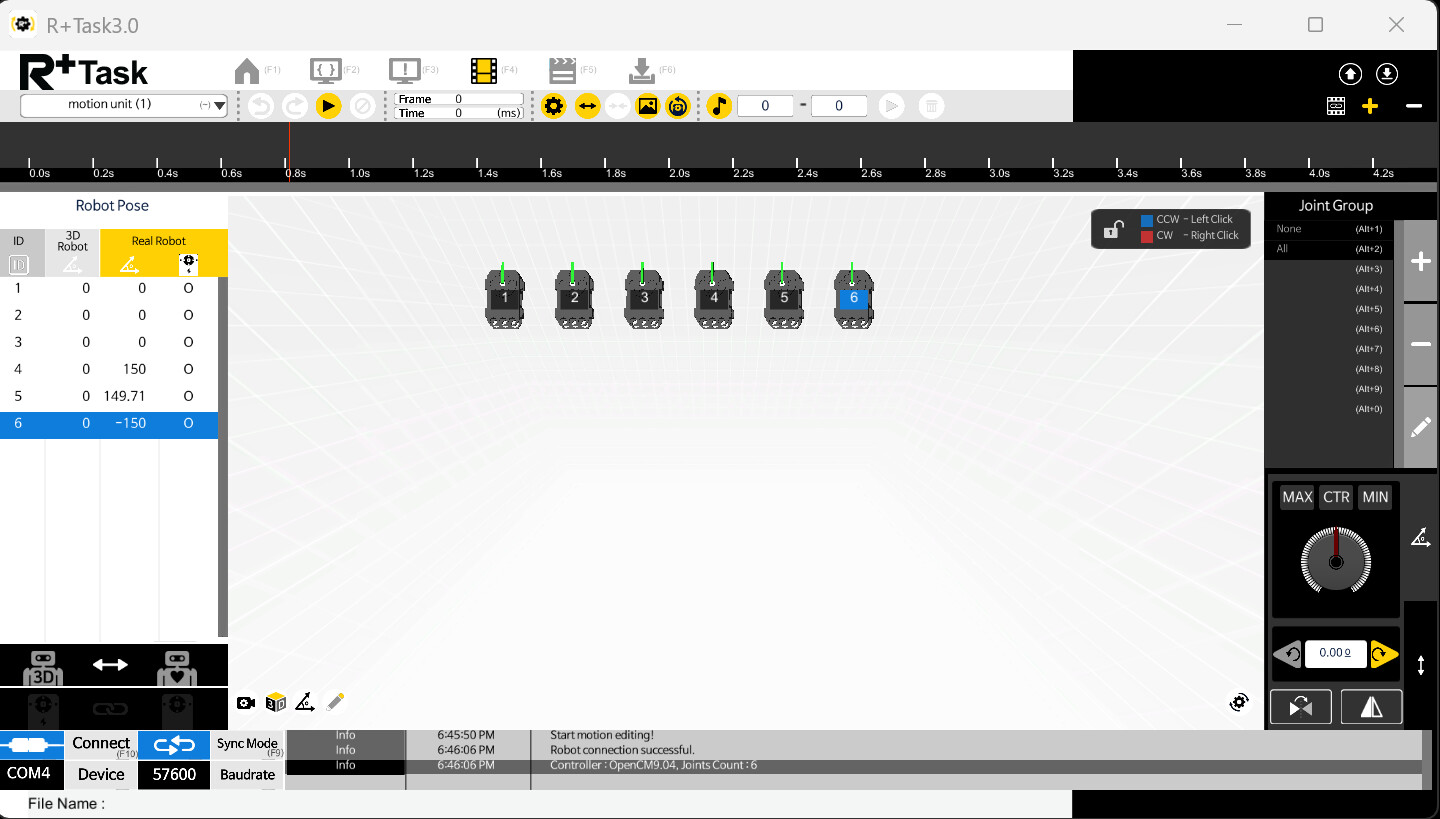
I have a Custom Robot with 6 XL-320s on an Open904-C all updated to the latest firmware. I can control all 6 DXLs using Manager and Task tools OK. When I used either Motion 2 or Motion 3, I could control only DXLs with IDs = 1,2,3. As soon as I synchronized Motion 2 or 3 to the Open904, immediately the DXLs with IDs = 4,5,6 went to either Goal Positions 0 or 1023 and then stayed there (probably because they reached the GP limits). I am enclosing the various MTN & TSK files. As MOTION 2 is affected in the same way as MOTION 3 - this bug had been around “a long time”. Am I probably the first end user to try a Custom Robot with 904 and XL-320s?
DYNAMIXEL Servo:
XL-320
DYNAMIXEL Controller:
Open-904C
Software Interface:
TASK 2, MOTION 2, TASK 3 (TASK & MOTION subtools)
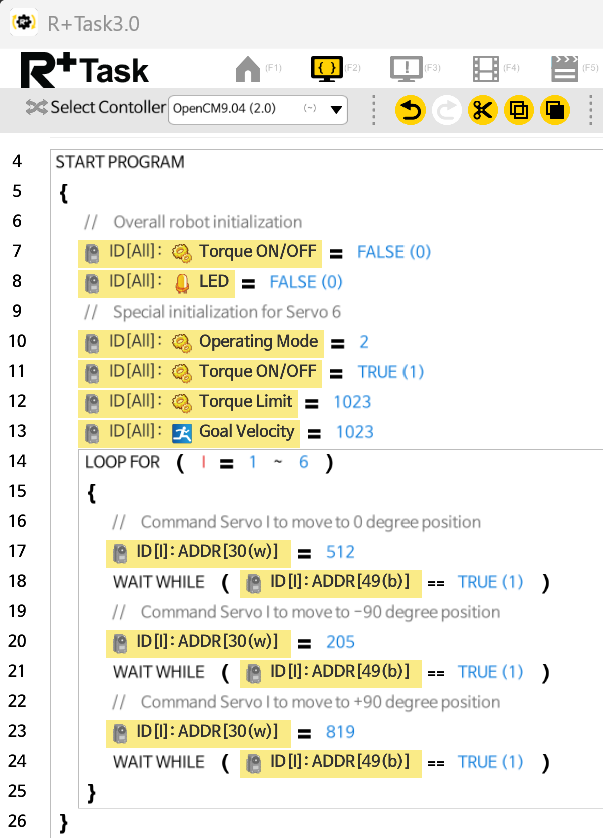

TestDXLs_1.tsk3 (1.3 KB)
TestDXLs_1.mtn3 (1.8 KB)
Please note that there is a bug in using MOTION 3 with XL-330s also, please see my earlier post: