Hi, I am currently working on a project using the velocity control mode for XH430-V350-R. Part of our work includes compliance control, in which we add a spring compoenent to our controller. To do that we need to know the input torque. Our cotroller currently outputs velocity, and thus in order to convert the input velocity into input torque we need to know the output of the velocity controller. Is it possible to get the archetecture and the parameter values of the velocity PI controller?
Thanks a lot!
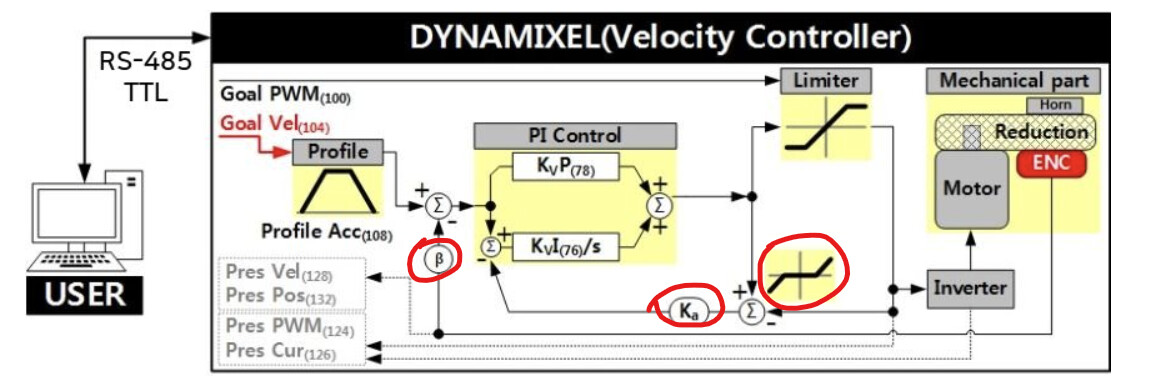
The available documentation on DYNAMIXEL’s internal PID controller is available on the ROBOTIS eManual page for the actuator in question.
Additionally, the Performance Graph provides the best possible way to estimate the output torque values for a given RPM and current input.
Hi Jonathon, thanks for the reply! I am aware of the eManual page, but on that diagram I have a few confusions. mainly: the Ka and beta values we don’t seem to be able to read, I am wondering how I can get the values for those? Also, for the graph plot symbol circled in this image, what does that mean? Thanks!
Hi, I wondering if there is going to be any update on this?
Can these values be disclosed?
Thanks