When modeling robotic arms, we always use equation as follows:

Where tau is the torque generalized by joint.
tau can be defined as follows:
tau = tau_motor - Iaddq-fvdq-fc
Where tau_motor is the force generated by motor, Ia is momentua of motor, fv and fc are friction parameters.
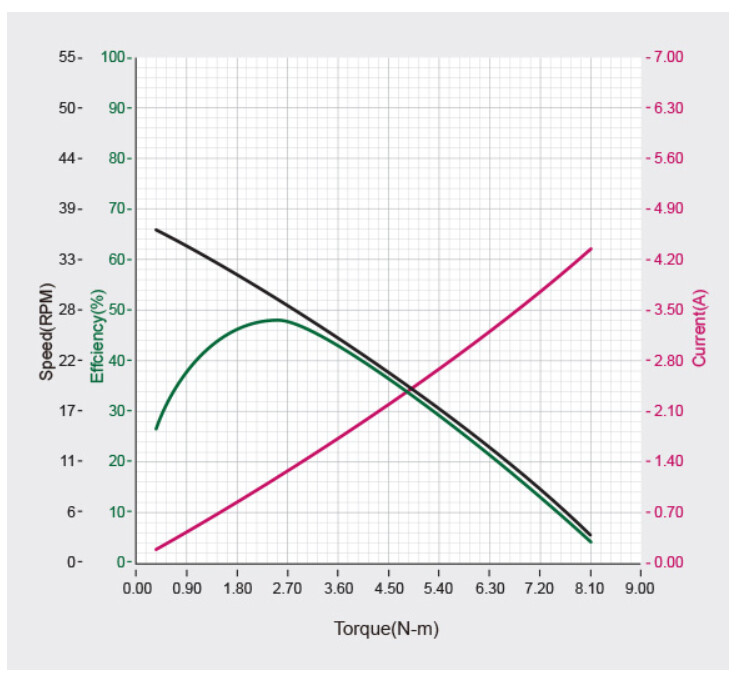
The performance graph of XH540-W270-T/R is as follows:
When you test the torque in your performance graph, is the speed of motor constant so ddq=0? If so, the torque in performance graph is just relative to current.
Do you test the friction torque when you test the motor torque? Or just test the load you add to the motor? If you just test the load, the torque in performance graph equals tau.